▶カタパルトの結果速報、ICCサミットの最新情報は公式Twitterをぜひご覧ください!
▶新着記事を公式LINEで配信しています。友だち申請はこちらから!
▶過去のカタパルトライブ中継のアーカイブも見られます! ICCのYouTubeチャンネルはこちらから!
ICC FUKUOKA 2024 リアルテック・カタパルトに登壇いただき3位に入賞した、人機一体 金岡博士さんのプレゼンテーション動画【「人機一体」は、憑依した感覚で強大な力を操れる人型重機で、人の“苦役”を解消する】の文字起こし版をお届けします。ぜひご覧ください!
ICCサミットは「ともに学び、ともに産業を創る。」ための場です。そして参加者同士が朝から晩まで真剣に学び合い、交流します。次回ICCサミット KYOTO 2024は、2024年9月2日〜 9月5日 京都市での開催を予定しております。参加登録は公式ページのアップデートをお待ちください。
本セッションのオフィシャルサポーターは 慶應イノベーション・イニシアティブ です。

▶【速報】廃プラ活用の3Dプリント型枠で、持続可能な建設業界をつくる「DigitalArchi」がリアルテック・カタパルト優勝!(ICC FUKUOKA 2024)
▼
【登壇者情報】
2024年2月19〜22日開催
ICC FUKUOKA 2024
Session 7A
REALTECH CATAPULT リアルテック・ベンチャーが世界を変える
Sponsored by 慶應イノベーション・イニシアティブ
金岡博士
人機一体
代表取締役 社長
HP | X(旧Twitter)
2002年京都大学大学院 機械工学専攻 博士後期課程研究指導認定退学、京都大学博士(工学)取得。同年立命館大学理工学部ロボティクス学科助手。2003年立命館大学理工学部ロボティクス学科講師。2007年マンマシンシナジーエフェクタズ株式会社を設立、代表取締役社長就任。2008年立命館大学総合科学技術研究機構ロボティクス研究センター客員教授。2015年株式会社人機一体に商号変更、代表取締役社長就任。現在に至る。
▲
金岡博士(かなおかはかせ) 株式会社人機一体(人機社)です。

東日本大震災で味わった屈辱
私はもともと立命館大学のロボット研究者でしたが、東日本大震災をきっかけに大学を出て、人機一体を立ち上げました。

福島第一原発事故では、「誰もがロボットの出番」だと思ったはずです。

しかし、我々には使えるロボットは一つもなかった。
これは、研究者としては屈辱的な経験でした。
それなら、災害対応ロボットを造ればそれで解決するのか?
いや、1台や2台、災害対応ロボットがあったとしても、何も変わりません。
大事なのは、役に立つ汎用ロボットが、「いたるところにある」という状態を作ることです。
当たり前を装って存在する平時の「苦役」を解消
だから我々は、より上位の課題、有事ではなく平時に当たり前を装って存在する「苦役」を解消します。
この機械文明の時代に、いまだに人が汗水たらして苦役に従事しているのは、歪んでいると思っています。
これは間違った状態です。
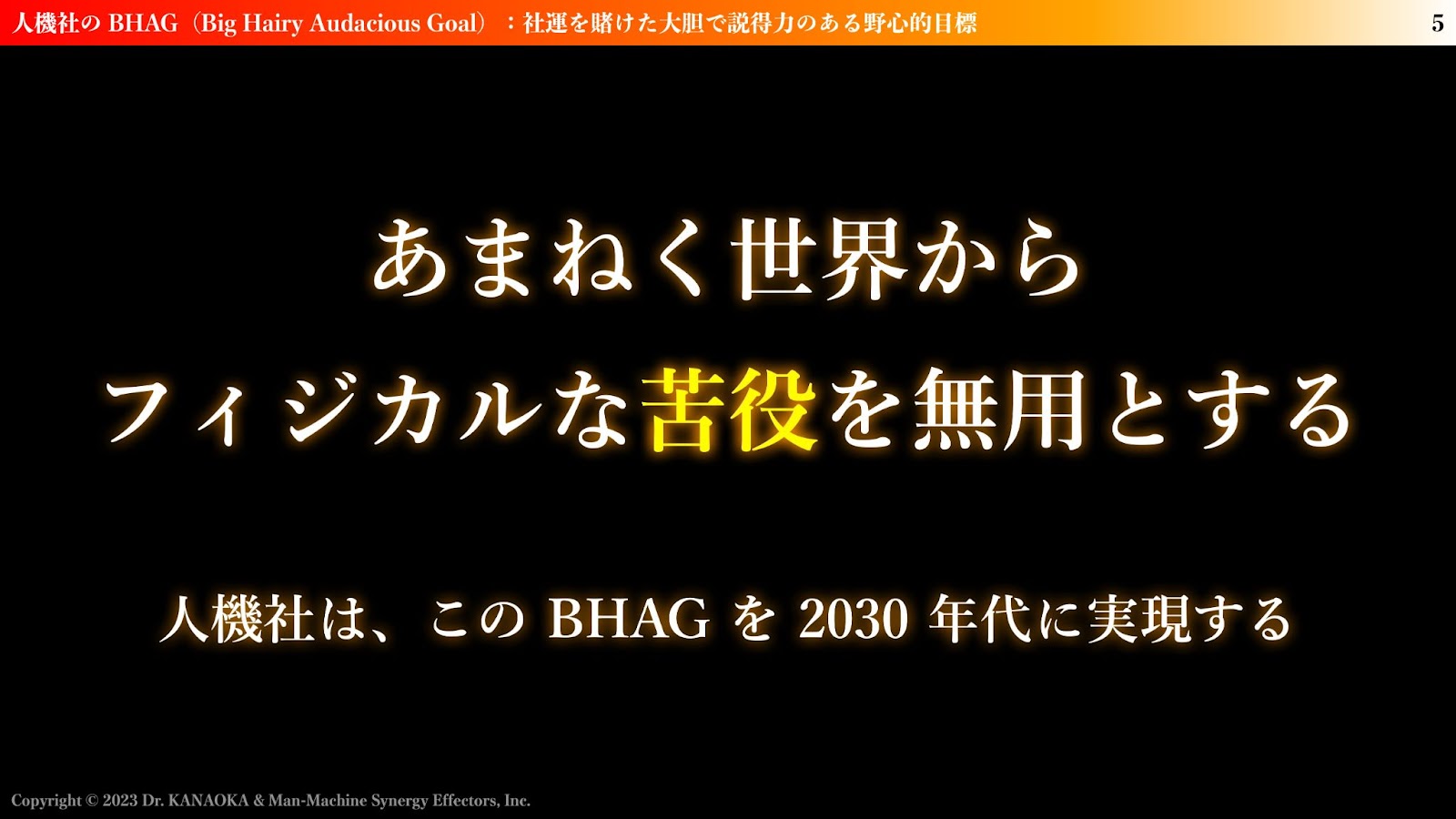
我々はあまねく世界からフィジカルな苦役を無用とすることを、BHAG(Big, Hairy, Audacious, Goals:ビーハグ、大胆不敵な目標)として掲げています。
人機社は、このBHAGを2030年代に実現します。
自分の体の延長であるかのように操作可能なロボット
我々の武器は、先端ロボット工学です。
ここに挙げるのは、我々が保有する独自の先端ロボット工学技術です。
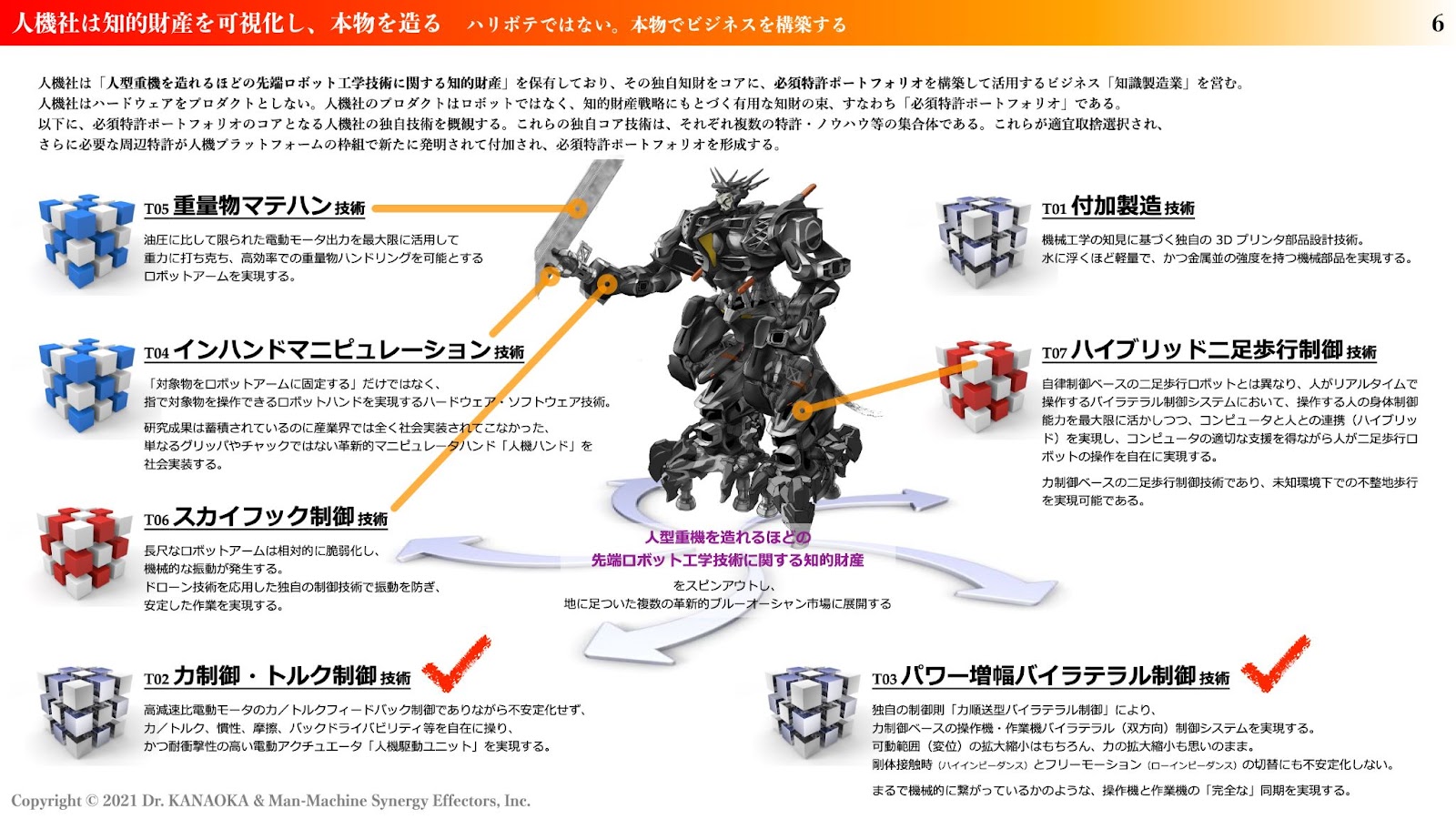
なかでもコアは、力制御・トルク制御技術、それから、パワー増幅バイラテラル制御技術の2つです。
これらによって、「何でもできる汎用ロボット」が実現します。
これは我々が開発した人型重機「零式人機(レイシキジンキ) ver.1.3」です。
パワー増幅バイラテラル制御技術、すなわち、人がロボットをまるで自分の体の延長であるかのように自在に操る技術を用いることで、未知の対象物を把持し、強大なロボットの力を人間が自在に操ることを可能にします。
ロボットの視覚も人に共有され、自分がロボットの体に乗り移ったかのような、憑依した感覚で操作でき、さらにロボットが感じる力も人にフィードバックされ、人が自らの力覚として感じることができます。
社会実装のために企業間コンソーシアムを組成
我々はBHAGを実現するために、先端ロボット工学技術を社会実装しなければなりません。
我々はシーズを持っていますし、世界には苦役があふれ、切実なニーズがあります。
ミスマッチではありません。
それなら簡単に社会実装できそうですが、決してそうではありません。
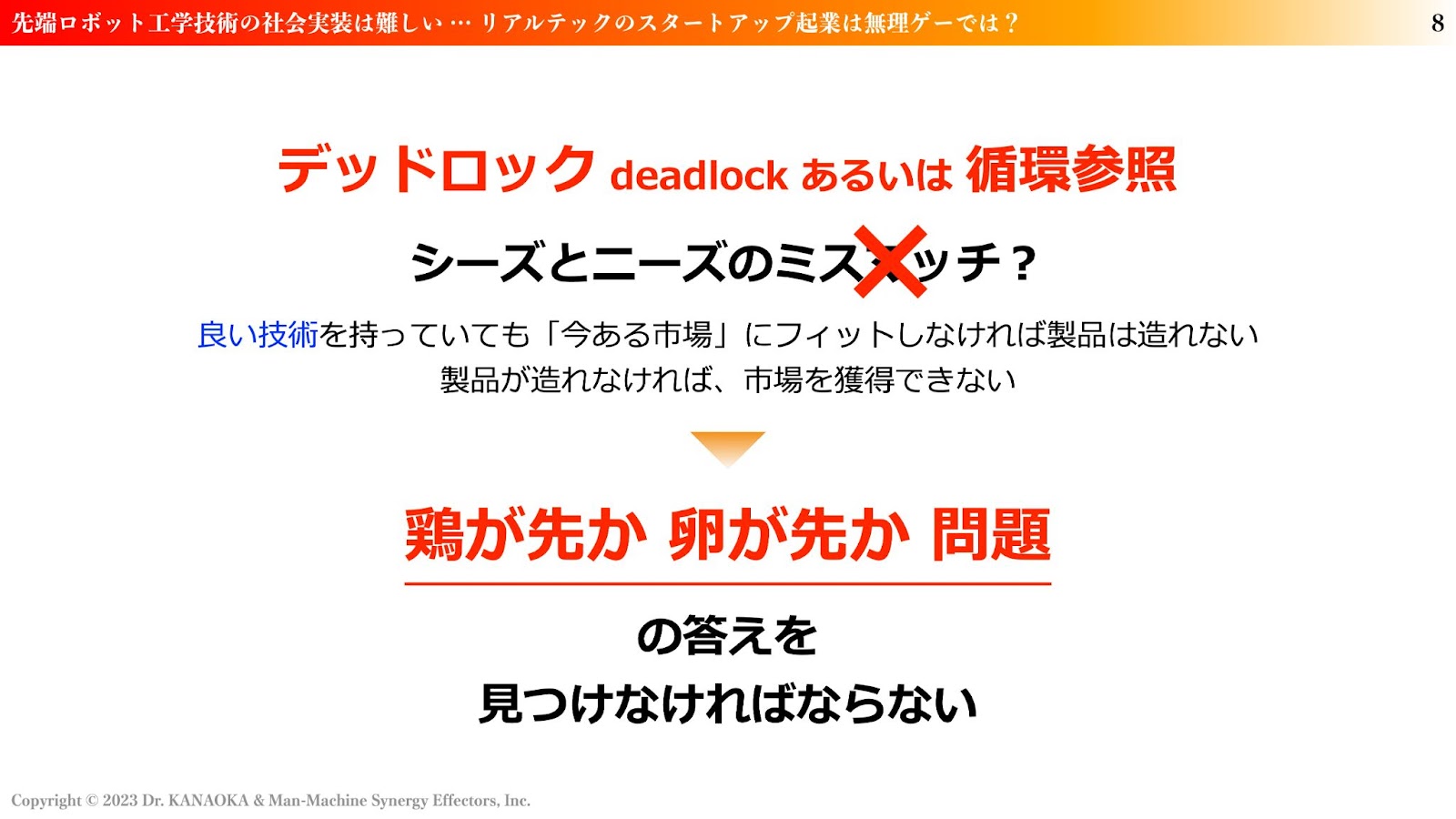
問題は「デッドロック」あるいは「循環参照」です。
良い技術を持っていても、今ある市場にフィットしなければ製品は造れませんし、製品が造れなければ市場獲得ができません。
この「鶏が先か、卵が先か問題」こそが、スタートアップとしての我々が解決すべき課題です。
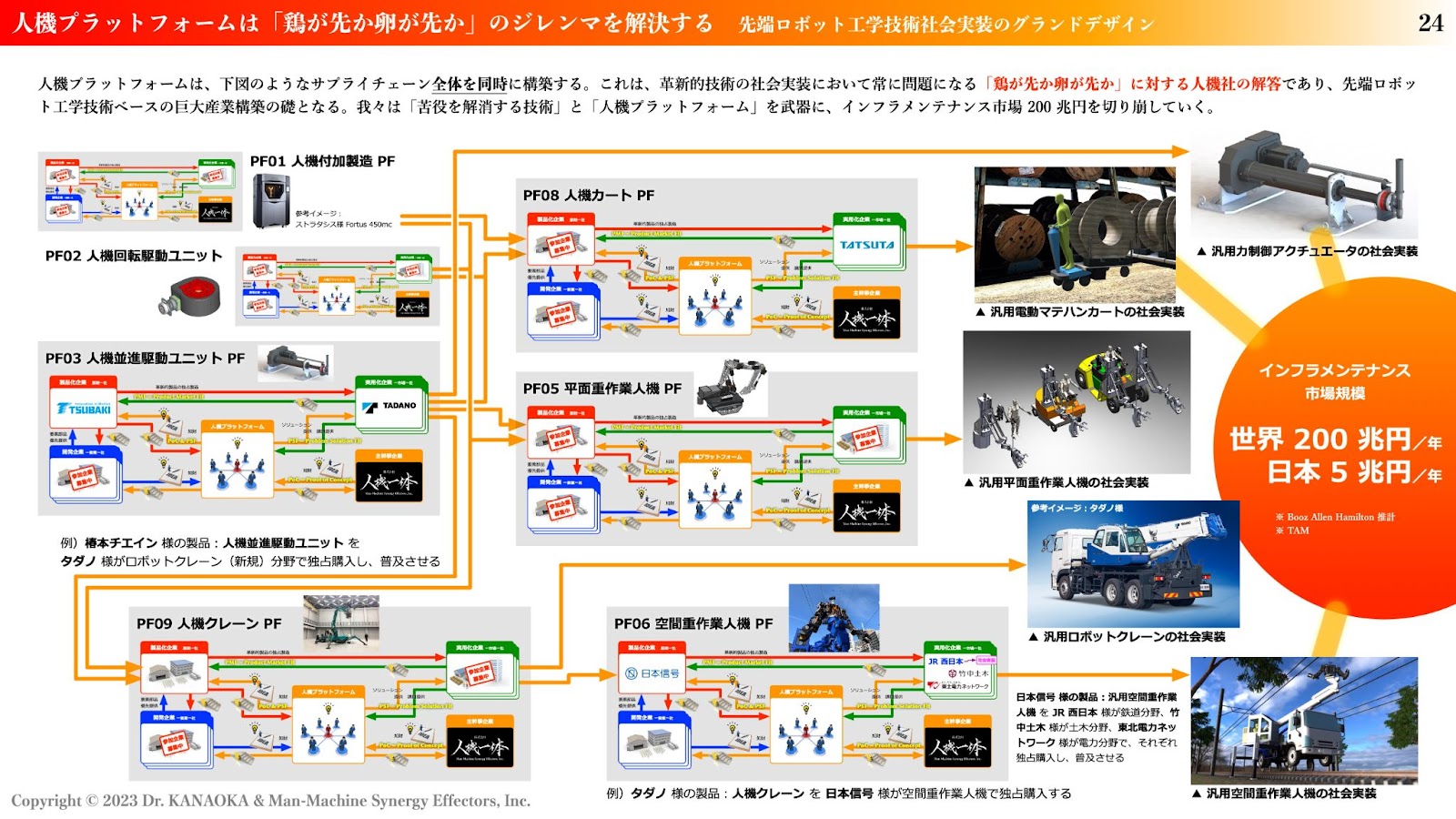
そこで我々は、「人機プラットフォーム」という独自ビジネスモデルを構築しました。
▶【告知】世界初、先端ロボット工学技術の知的財産を活用した 革新的ビジネスを創出するサブスクリプション型サービス「人機プラットフォーム」を開始します(PR TIMES)
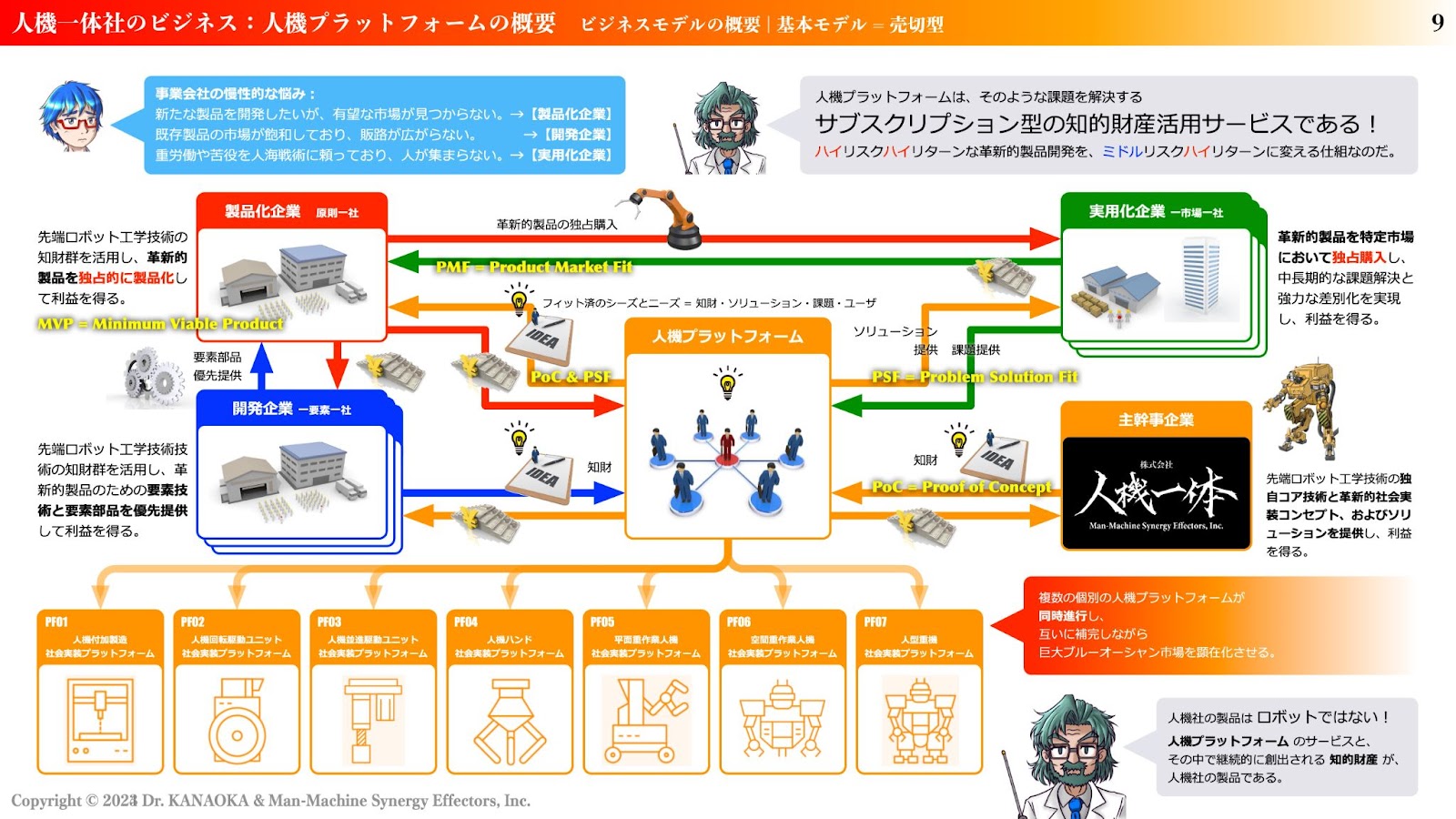
人機一体が製造業ではなくハブとなり、製品化企業であるメーカーと、実用化企業、すなわちユーザーと、知的財産をベースとした企業間コンソーシアムを組成し、「鶏が先か、卵が先か問題」を超えるための枠組みです。
夜間の危険な重作業を行う人型重機を開発
最初の人機プラットフォームは、製品化企業を日本信号様、実用化企業をJR西日本様としてすでに稼働しており、ゼロイチの開発をほぼ達成しています。

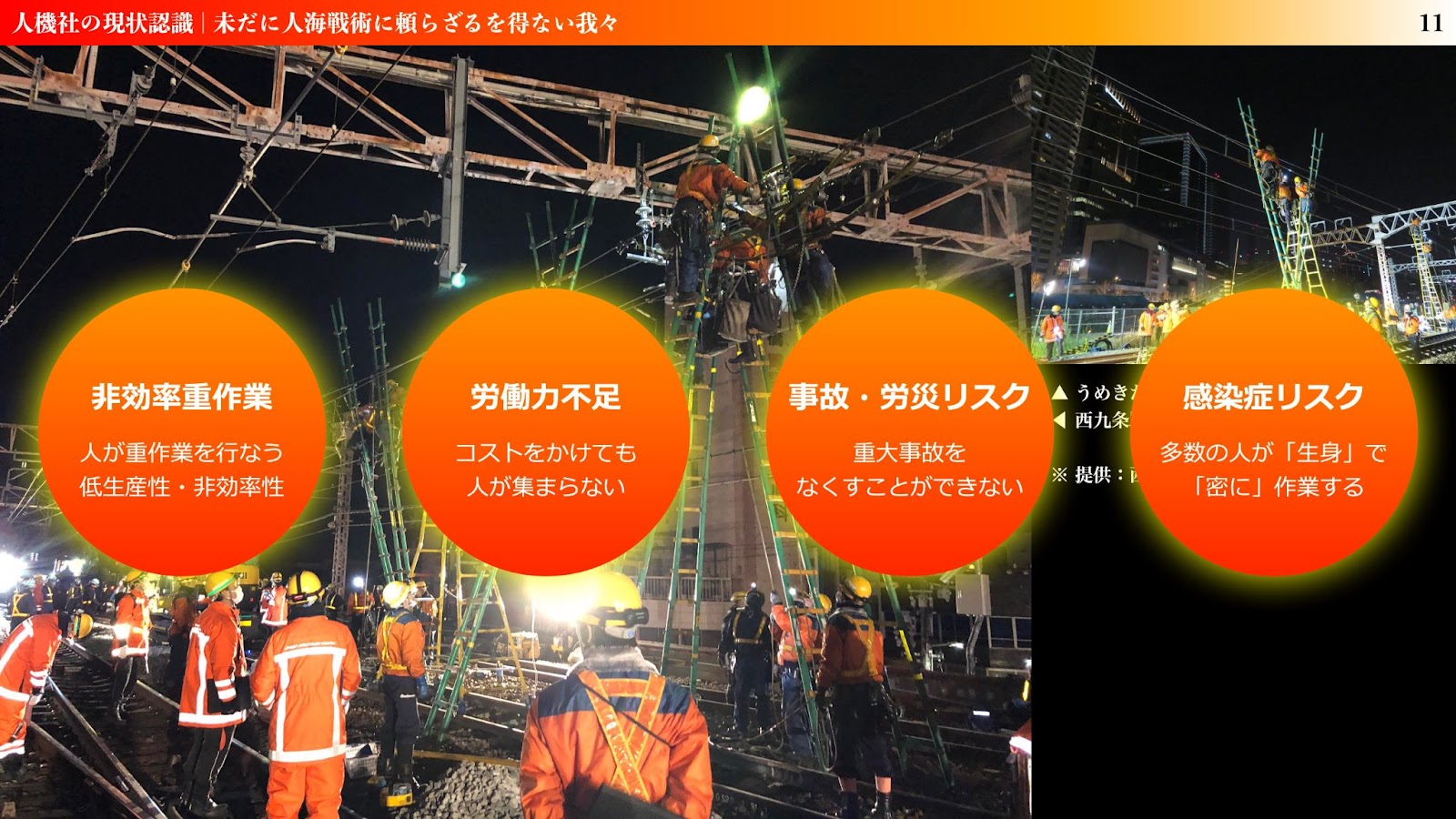
ファーストターゲットは、鉄道の高所電気設備のメンテナンス作業です。
夜中の数時間に人力を使い、人海戦術でこなしている非効率重作業、労働力不足、事故・労災リスク等の課題を抱える重作業です。
この課題を解決しうる人型重機「零式人機 ver.2.0」を開発しました。
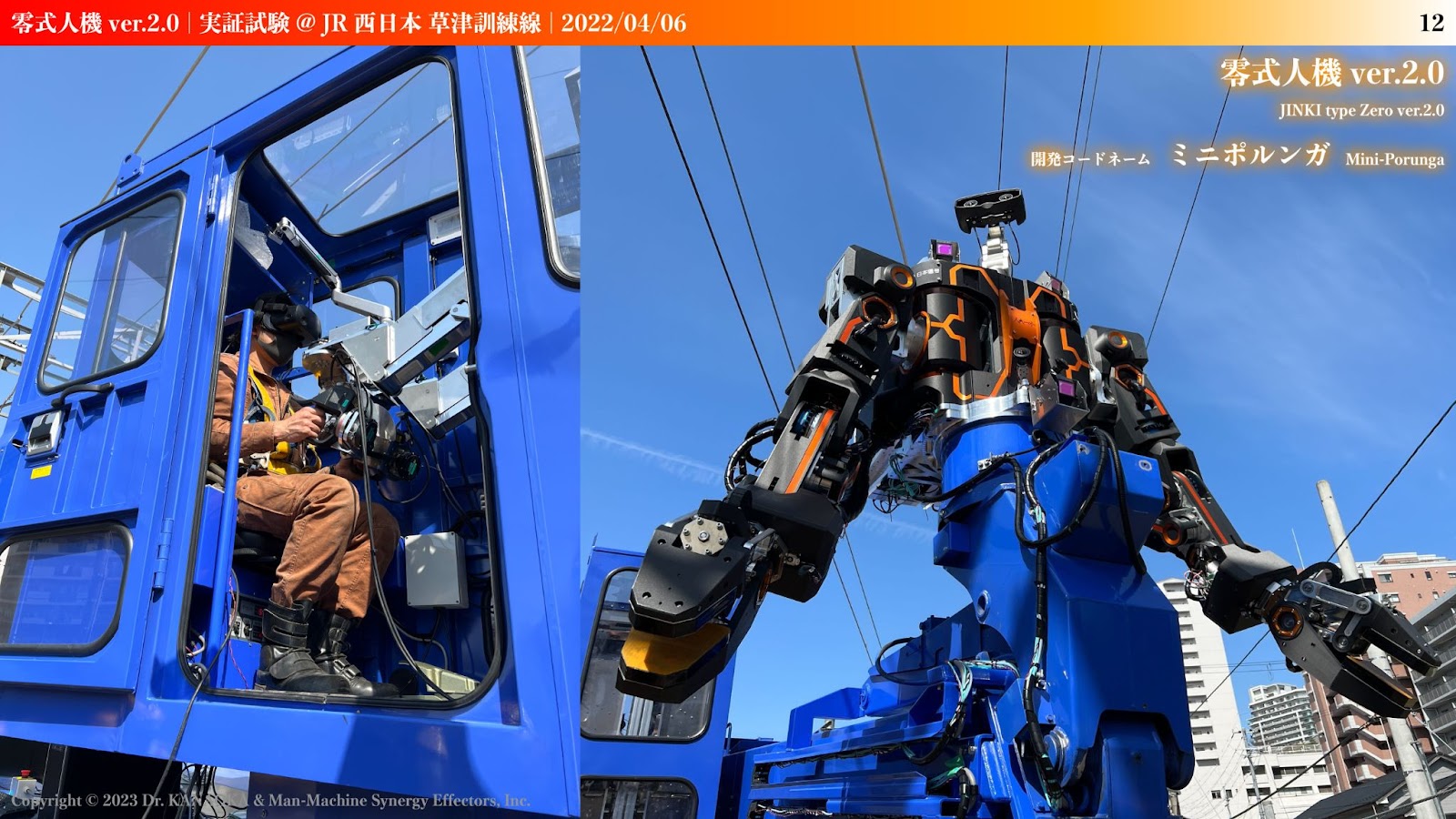
これが、「零式人機 ver.2.0」です。
人機社の力制御技術、パワー増幅バイラテラル制御技術を駆使して、まるで自分が空中を飛び回っているかのように、強大な力を自在に操ることができます。
2年近い実証実験を経て2024年度に製品化
この「零式人機 ver.2.0」を用い、JR西日本様の訓練線にて実証試験をすでに2年近く断続的に行っています。

本物の設備をロボットで取り扱い、営業線のすぐ傍で、もう人型重機が現実に活躍し始めています。

30kg以上もある重量部品を簡単にハンドリングしたり、長尺部品を両手で器用に操ったり、長尺のツールさえ自在に操ることができます。



これは既存の産業ロボットでは、ほぼ不可能な作業です。
柔軟な力のやり取りを含む、人との協調作業も可能です。

実証試験の結果を経て、零式人機は2024年度に日本信号様から製品化され、JR西日本様の営業線での使用が開始されることが決まっています。

▶「零式人機ver.2.0」が起動、高所重作業という“苦役”の解消へ(MONOist)
鉄道以外のインフラメンテナンス作業へ横展開
このように鉄道分野でのゼロイチ(0→1)実現まで我々は漕ぎつけたのですが、さらにこれから、1→10、10→100を実現していかなければなりません。
人機プラットフォームには、その機能が組み込まれています。

すでに人機プラットフォームには、竹中土木様と東北電力ネットワーク様に参画頂き、鉄道分野だけではなく、土木、電力、道路等のインフラメンテナンス作業への横展開が始まっています。
▶竹中土木 × 東北電力ネットワーク × 日本信号 × 人機一体による汎用人型重機「空間重作業人機」開発プロジェクト第二期を公開しました(PR TIMES)

これで1→10が実現できます。
さらに人機プラットフォームは、1つだけではありません。
プラットフォームを複数並行して走らせて、人機社の先端ロボット工学技術を用いて、それぞれのプラットフォームがそれぞれの製品を開発して、さらにそれらが、サプライチェーンの中で有機的に結合します。
それによって10→100が実現でき、我々はBHAGを達成します。
超重量物を扱うロボットや人型ロボットを開発中
例えば、これはJR西日本様と一緒に開発した「零二式人機 ver.1.0」で、数百kgクラスの重量物を自在に操る巨大な右腕です。
▶株式会社人機一体は、汎用単腕重機「零二式人機 ver.1.0」を 2023 国際ロボット展にて初公開しました(PR TIMES)
これは竹中土木様と開発中の「人機スチュワートプラットフォーム ver.1.3」です。
トンクラスの超重量物をまるでレゴブロックであるかのように軽々と操るロボットです。
あるいは「零式人機 ver.1.3」と「零式人機 ver.2.0」の人型重機同士の協調作業、さらに川崎重工業様にご協力いただき、人間サイズの全身ヒューマノイドロボットを自分の分身として操る技術を開発しています。
▶人機一体がヒューマノイド「零一式カレイド」のデモを公開 川崎重工のカレイドをベースに力制御技術を搭載した遠隔操作ロボット(ロボスタ)
これらも、東北電力ネットワーク様の送電線メンテナンス等に活用される予定です。
あまねく世界からフィジカルな苦役を無用に
我々人機一体は、先端ロボット工学技術と人機プラットフォームに基づき、アプリケーションメーカーではなく、汎用物理作業プラットフォームを提供するプラットフォーマーとなります。

最終的には我々が子どもの時に夢見た、いわゆる「人型重機」を自在に操る未来を実現し、人機社のBHAGである「あまねく世界からフィジカルな苦役を無用とする」を、2030年代に完全に達成します。

以上です。ありがとうございました。
(終)
▶カタパルトの結果速報、ICCサミットの最新情報は公式Twitterをぜひご覧ください!
▶新着記事を公式LINEで配信しています。友だち申請はこちらから!
▶過去のカタパルトライブ中継のアーカイブも見られます! ICCのYouTubeチャンネルはこちらから!
編集チーム:小林 雅/浅郷 浩子/正能 由佳/小林 弘美/戸田 秀成