
▶平日 毎朝7時に公式LINE@で新着記事を配信しています。友達申請はこちらから!
▶ICCの動画コンテンツも充実! Youtubeチャネルの登録はこちらから!
メルティンMMI粕谷昌宏さんのプレゼンテーションを2回シリーズでお届けします。(その2)は、メルティンMMIが義手開発の先に見据える、目指す姿についてお話いただきました。全ての生体信号をクラウドに集める壮大なビジョンです。
ICCカンファレンス FUKUOKA 2017スタートアップ・コンテスト「カタパルト -リアルテック特集-」Supported by リアルテックファンド プレゼンテーションの書き起こし記事です。メルティンMMIは見事、ベストプレゼンターに輝きました。是非御覧ください。
![]()
本記事で特集しております8分間のプレゼンテーションを行う「CATAPULT(カタパルト)」のプレゼンターを募集しております。「スタートアップ」「IoT/ハードウエア」「リアルテック」「カタパルト・グランプリ」の4カテゴリーで募集しております。ぜひ募集ページをご覧ください。
▼
【登壇者情報】
2017年2月21日・22日・23日開催
ICCカンファレンス FUKUOKA 2017
CATAPULT(カタパルト) -リアルテック特集-
Supported by リアルテックファンド
粕谷 昌宏
メルティンMMI
取締役CEO
人の身体機能を補完・拡張するサイボーグ工学に可能性を感じ、2003年より研究をスタートする。2010年には義手の新たな制御手法を提案し、翌年に日本ロボット学会より表彰を受けた。2012年には義手に感覚を持たせる研究を行い、早稲田大学大学院にて修士号を取得。同年、電気通信大学大学院の博士後期課程に入学する。2013年に日本学術振興会特別研究員を経て、2014年に研究を実用化するため株式会社メルティンMMIを設立、執行役員に就任する。2015年に同社取締役執行役員に就任、現在に至る。専門分野はロボット工学、人工知能工学。メルティンMMIでは「全ての人から身体的バリアを取り除く」というスローガンのもと、サイボーグ工学において要となる、人と機械を繋ぐマンマシンインターフェースの開発を行っている。
▲
▶最先端の筋電技術で身体を拡張する「メルティンMMI」の配信済みの記事
【前の記事】

【本編】
▼Part 1のハイライト▼
粕谷 メルティンMMI(以下、「メルティン」)は、電気通信大学の大学発ベンチャーです。
僕が博士課程として在学中の2013年に起業しました。
メルティンでは現在、自分の手のように直感的に操作できる義手を開発しています。

この義手を開発する要素技術として必要なのが、生体信号処理技術とワイヤ干渉駆動制御技術です。
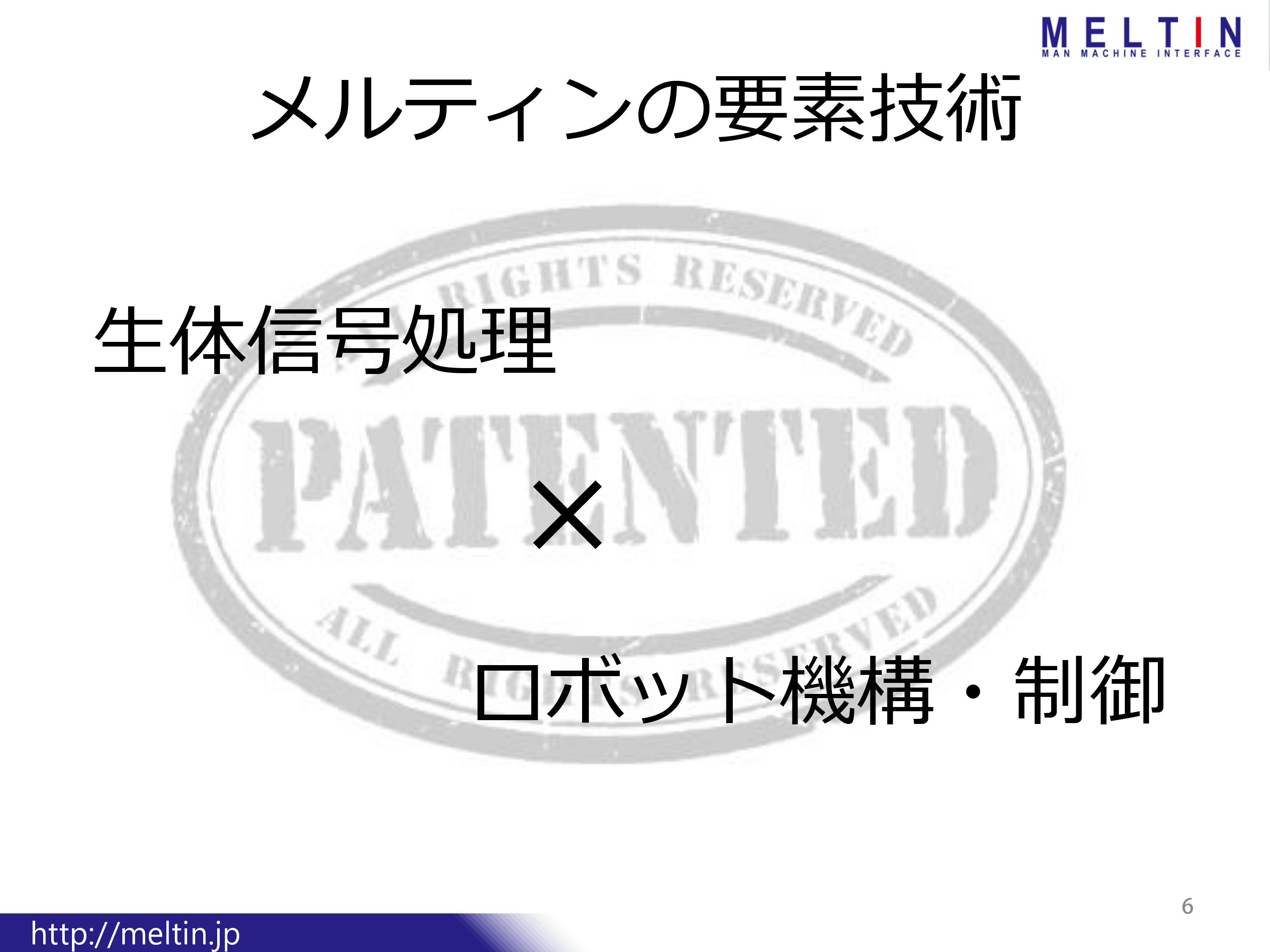
ちょっと難しいような言葉が出てきましたが、要は生体信号処理というのは、人の身体を流れている電気信号を解析することによって機械を制御するテクノロジーです。
生体信号処理技術において、通常の義手は基本的に筋電の大小しか見ていません。例えば、筋電計をこの図のように2つ貼り付け、筋電計1が反応していればパー、2が反応していればグーといった大まかな形でグーパーを制御しています。
それに対してメルティンは、筋電の種類を見分けられます。単純に筋電が出ている、ではなくて、どういう筋電が出ているかが分かります。この信号はグーだとかチョキだとか、それが分かることによって、グーパー以外の非常に多彩な動きを作ることができます。

他のロボットハンドに比べ、握力や関節の自由度で規格外の性能を誇ります。そのようなスペックでありながら、重量も非常に軽くなっています。
自由度は高いのですが、重量は軽い。
それによって上の画像のように軽快な動作ができるようになっています。
▲Part 1のハイライトはここまで▲
▼Part 2 はこちらから▼
粕谷 生体信号処理×ロボット機構・制御といった技術を開発してきたわけですが、僕個人の研究の歴史とは別に、基となった大学の研究の推移はこのような感じになっています。
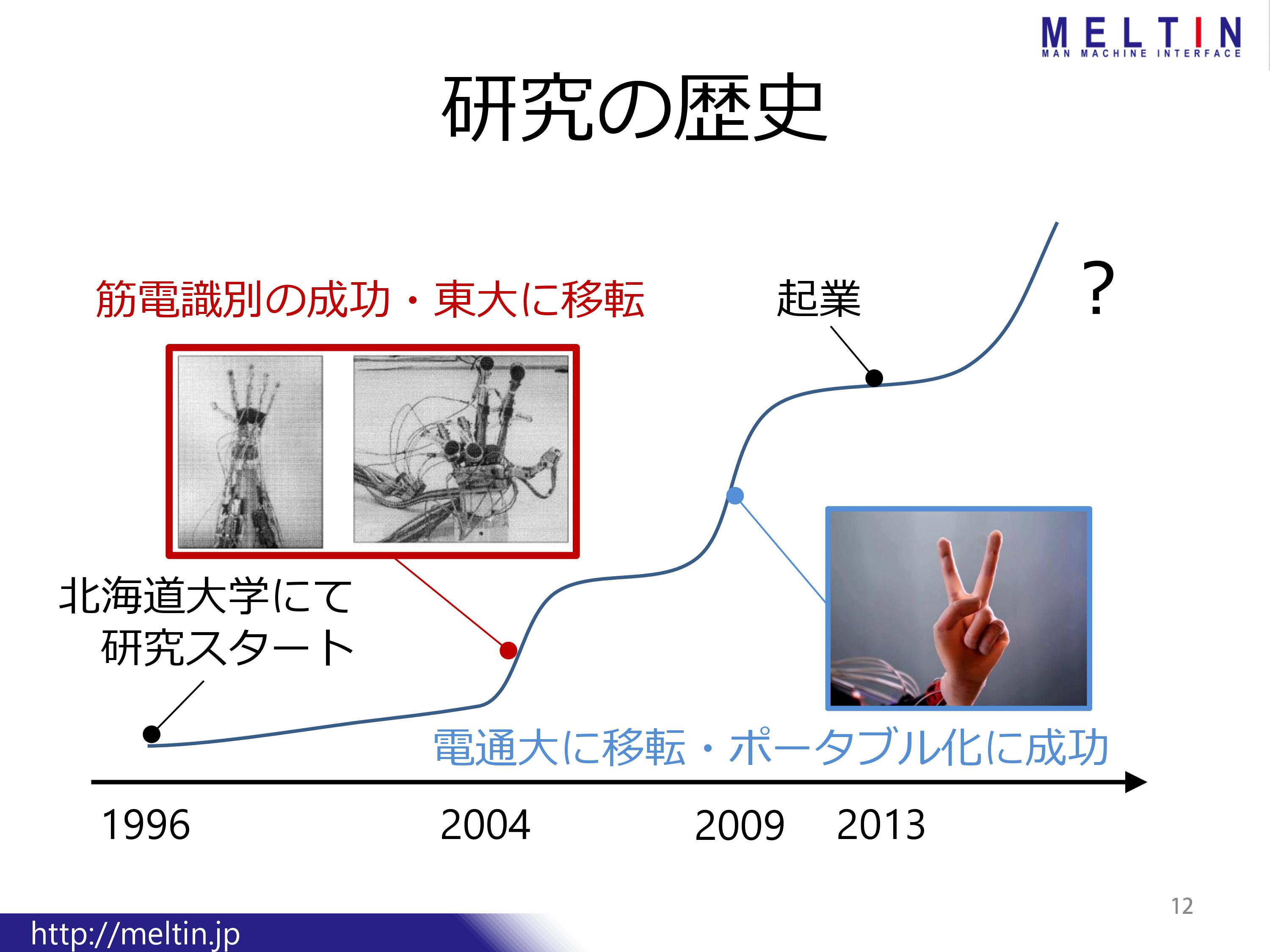
元々は96年に北海道大学で研究が始まりました。
そして2004年頃、筋電識別が上手くいきはじめて、東京大学に研究室が移転しました。ただ、この段階ではこのシステムはコンピュータで動いていたのみで、実用化にはまだ遠かったのです。
2009年、電気通信大学に移転してきた頃に、ポータブル化に成功しました。ポータブル化ができたのであれば実用化も近いだろうということで、2013年に起業したという流れになります。
全人類から身体的なバリアを取り除く
今までずっと義手に関する話をしてきましたが、メルティンは義手だけをやる会社ではありません。
メルティンは、全人類から身体的なバリアを取り除く、という命題に取り組むベンチャーなので、義手はあくまでその第一ステップです。
そして、このテーマについて大学ではできなかった、ベンチャーならではのブレークスルーで取り組んでいこうと思っています。

それは何かというと、クラウド型の筋電センサーというものを普及させ、それによって世界中の人の筋電信号を大規模解析するということです。
筋電の信号には色んな情報がのっていて、先程の「義手を動かす」という運動意図以外にも身体の内面の状態、例えば筋肉がどれくらい疲れているか、ストレスがあるか、といった情報も解析すると分かります。
ですから、筋電信号を便利なツールとしてユーザーさんに使っていただき、そのバックグラウンドで僕たちはデータを蓄積、解析し、次のアルゴリズムの精度構築に活かしていきます。
そうすると更に便利になって、便利になるとユーザーさんが増えて、というループを回すことができます。
テクノロジーの最先端を走っているうちに、メルティンが世界で先駆けてこのループを回していくことにより、誰も追従することのできない世界一のアルゴリズムであり続ける、そういうことをやろうとしています。

そして、この段階では筋電ですが、ゆくゆくは筋電以外の全ての生体信号についてこれをやりたいと思っています。
全生体信号ビッグデータのストアへ
それをメルティンが管理するようになり、巨大なデータベースの構築をします。そして、ここまでくると、このデータベースが違う意味を持ってきます。
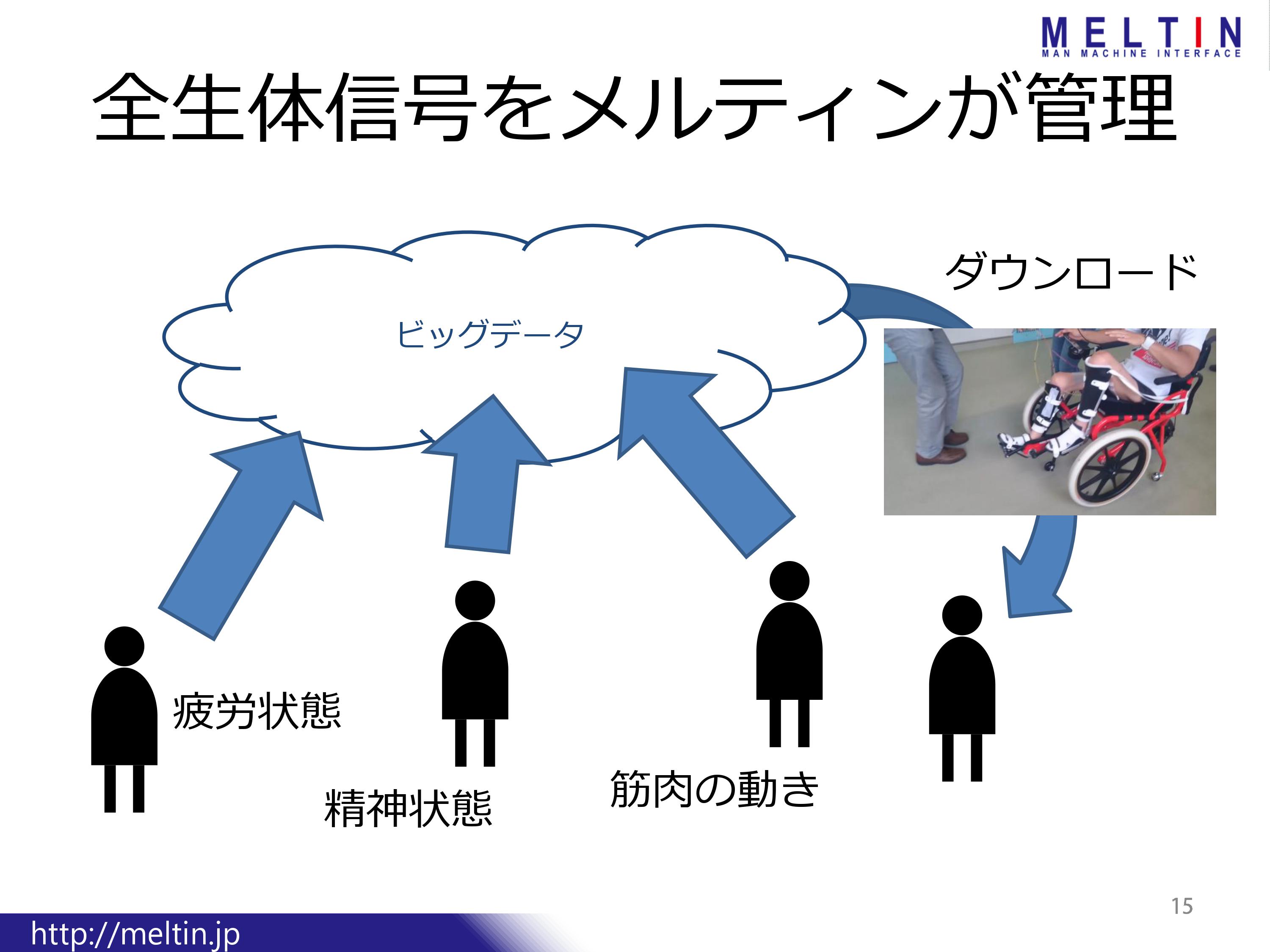
これは少し別な技術で、スライド右の男性は自転車を漕いでいますが、実は下半身が完全麻痺している方です。彼は自分の意思ではピクリとも足を動かすことはできません。
ただ、生体信号を扱うことができるので、彼の足に対して「自転車を漕げ」という擬似的な信号を与えることができます。
そうすると、全く足が動かなかった方が自転車をスルスルと漕ぐことができます。
これを使うと、ゆくゆくはメルティンが管理するビックデータがストアになり、技能というものは練習して獲得するものではなくて、ここのストアから購入、ダウンロードしてインストールするという面白いことになるかもしれません。
ワイヤレス筋電計を発売し、技術活用可能な分野を探求
来月開発者向けのベータ版として、ワイヤレス筋電計を発売することを計画しています。スライドの画像が筋電計ですが、その他にワイヤレスのモジュールがありまして、これがあるとワイヤレスで筋電データが飛ばせます。
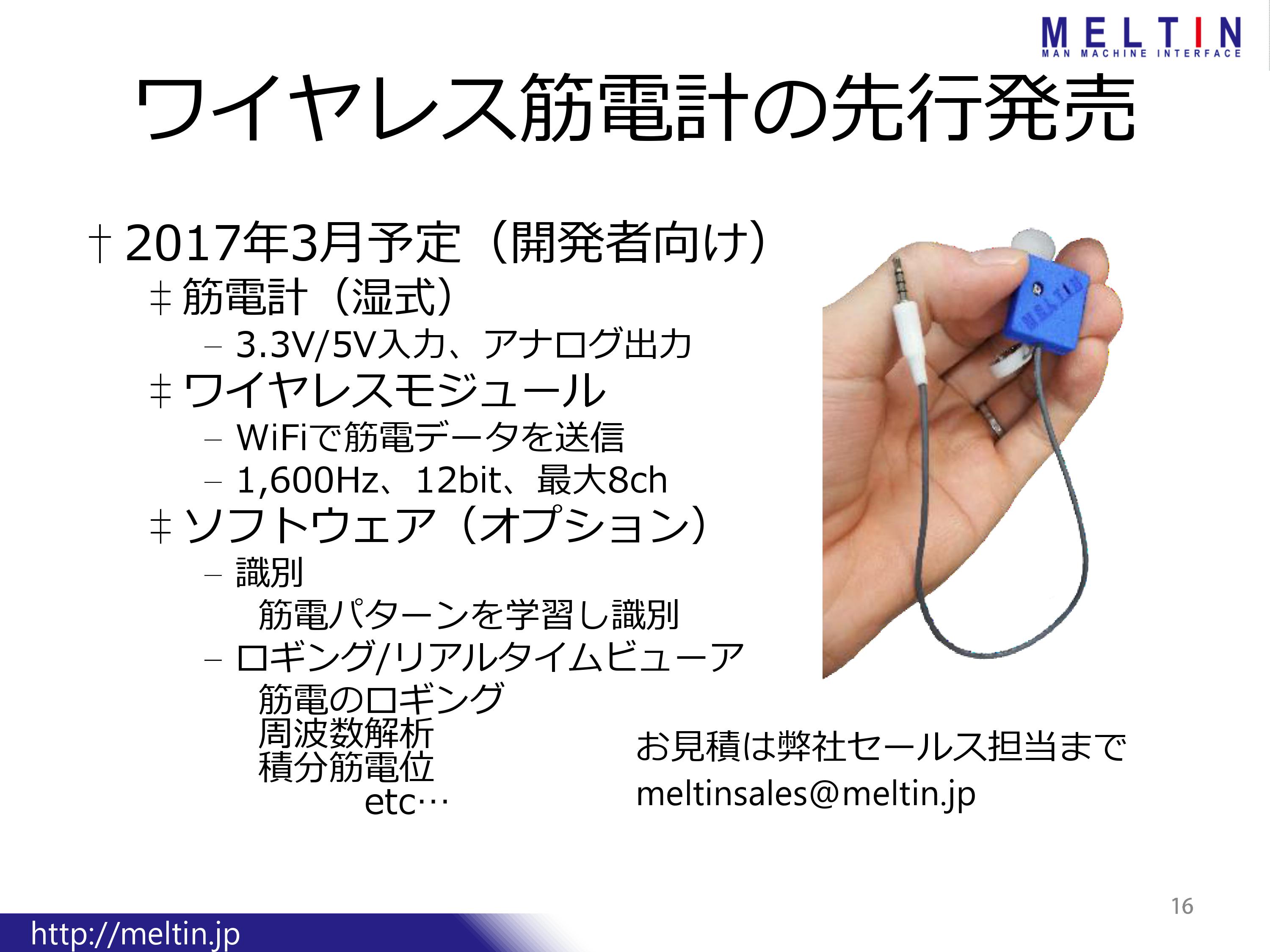
その他に識別ソフト等もつけて、自由に色んなことができるようになります。
これで僕がまず何をやったかというと、3本の手ではんだ付けをしました。
僕が首をかしげると手首が回り、口をパッと開くと手が開くのですが、実は僕の首のところに筋電センサーが貼られています。
それで僕の口と首の筋電を取りまして、自分の2本の手とは独立して3本目の手を制御するという形になります。

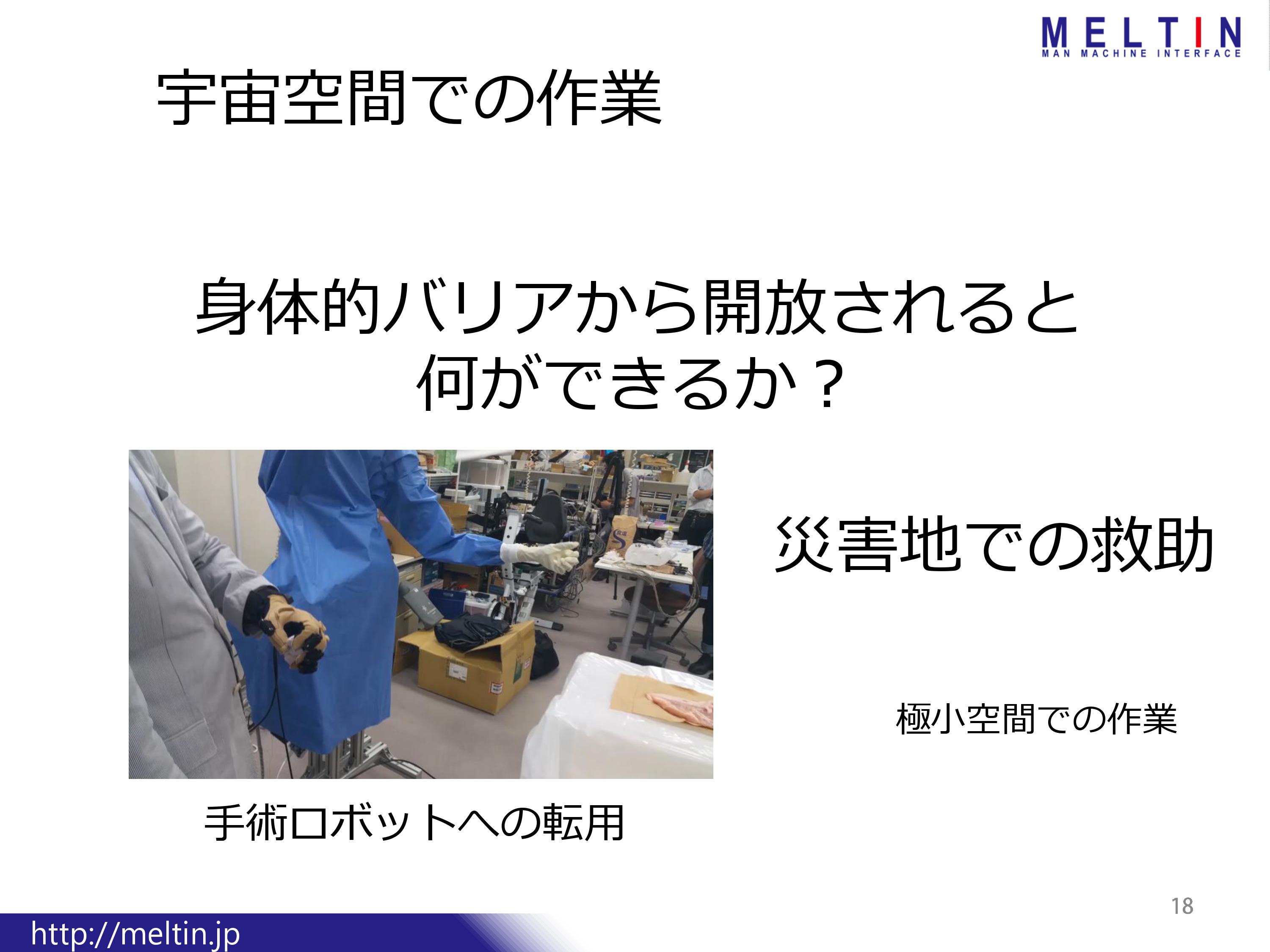
身体的バリアから解放されると何ができるか、ということを皆さんと一緒にこれで探求したいわけです。
手術ロボットへの転用も始めていて、これは患者の身体に小さい穴を空けて中に入った際、その中で通常サイズの手に展開することができるので、非常に低侵襲の手術ができます。
そういうことをこれから皆さんと一緒にディスカッションしてやっていけたらと思っています。会場のブースにも展示していますので、ピンと来た方は是非起こしください。
ありがとうございました。
▶メルティンMMI粕谷昌宏さんのプレゼンテーション動画をぜひご覧ください。
メルティンMMIは「カタパルト」- リアルテック特集 – のベストプレゼンターに選ばれました!リアルテックファンドの永田さん、丸さん、千葉さんとの一枚です。

(終)
▶平日 毎朝7時に公式LINE@で新着記事を配信しています。友達申請はこちらから!
▶ICCの動画コンテンツも充実! ICCのYoutubeチャネルの登録はこちらから!
編集チーム:小林 雅/榎戸 貴史/戸田 秀成/横井 一隆/立花 美幸/城山 ゆかり
【編集部コメント】
最後までお読みいただきありがとうございます!他にも多く記事がございますので、TOPページからぜひご覧ください。
更新情報はFacebookページのフォローをお願い致します。
