
▶平日 毎朝7時に公式LINE@で新着記事を配信しています。友達申請はこちらから!
▶ICCの動画コンテンツも充実! Youtubeチャネルの登録はこちらから!
メルティンMMI粕谷昌宏さんのプレゼンテーションを2回シリーズでお届けします。(その1)は、会社設立に至る経緯やメルティンMMIが持つ筋電技術についてお話し頂きました。
ICCカンファレンス FUKUOKA 2017 「カタパルト -リアルテック特集-」Supported by リアルテックファンド プレゼンテーションの書き起こし記事です。メルティンMMIは見事、ベストプレゼンターに輝きました。是非御覧ください。
![]()
本記事で特集しております8分間のプレゼンテーションを行う「CATAPULT(カタパルト)」のプレゼンターを募集しております。「スタートアップ」「IoT/ハードウエア」「リアルテック」「カタパルト・グランプリ」の4カテゴリーで募集しております。ぜひ募集ページをご覧ください。
▼
【登壇者情報】
2017年2月21日・22日・23日開催
ICCカンファレンス FUKUOKA 2017
CATAPULT(カタパルト) -リアルテック特集-
Supported by リアルテックファンド
粕谷 昌宏
メルティンMMI
取締役CEO
人の身体機能を補完・拡張するサイボーグ工学に可能性を感じ、2003年より研究をスタートする。2010年には義手の新たな制御手法を提案し、翌年に日本ロボット学会より表彰を受けた。2012年には義手に感覚を持たせる研究を行い、早稲田大学大学院にて修士号を取得。同年、電気通信大学大学院の博士後期課程に入学する。2013年に日本学術振興会特別研究員を経て、2014年に研究を実用化するため株式会社メルティンMMIを設立、執行役員に就任する。2015年に同社取締役執行役員に就任、現在に至る。専門分野はロボット工学、人工知能工学。メルティンMMIでは「全ての人から身体的バリアを取り除く」というスローガンのもと、サイボーグ工学において要となる、人と機械を繋ぐマンマシンインターフェースの開発を行っている。
▲
粕谷 メルティンMMIの粕谷です。
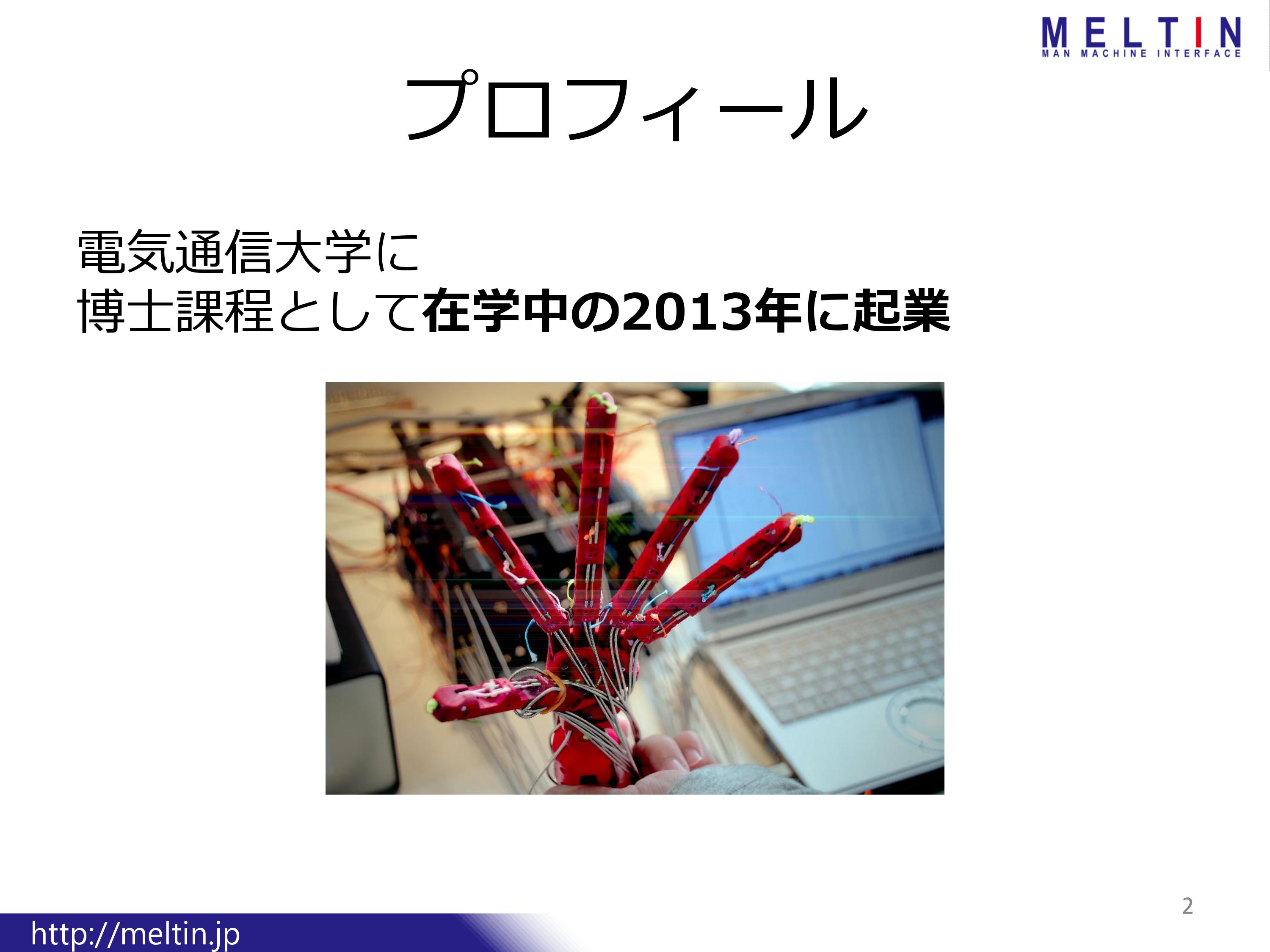
メルティンMMI(以下、「メルティン」)は、電気通信大学の大学発ベンチャーです。
僕が博士課程として在学中の2013年に起業しました。
下の画像のように、自分の手のように直感的に操作できる義手を今開発しています。

サイボーグ技術に可能性を感じ、研究に熱中
なぜこのようなことをやり始めたかというと、小さい頃から、将来はロボット博士になりたいと思っていました。
写真にある通り、小学校の時に自作でモーターを作って、自分なりに日々研究していたのですが、やはりこういう子どもは周りから変な目で見られるわけですね。
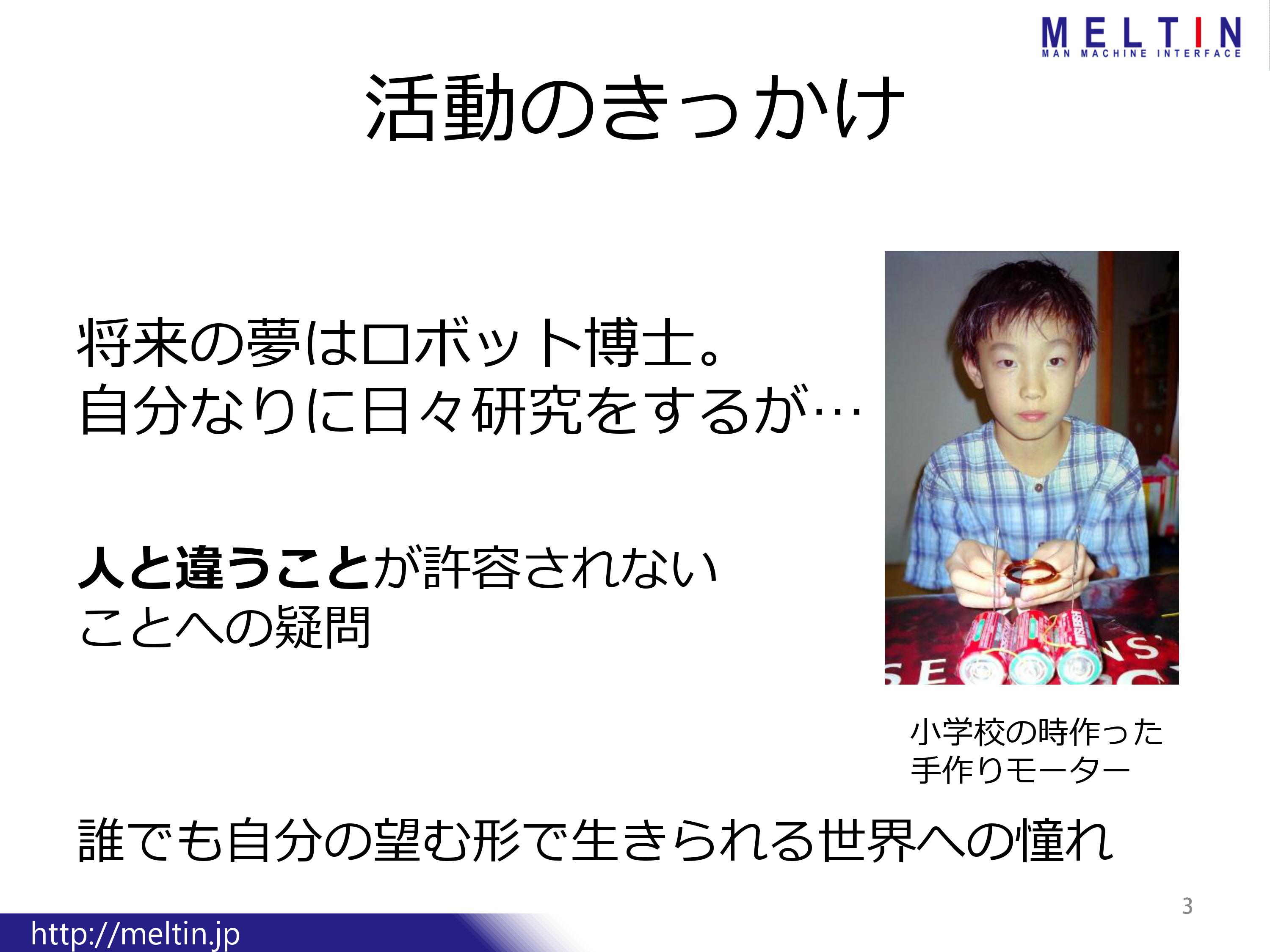
そうすると、人と違うことが許容されない社会、こういうことに対して自分の中で疑問が湧いてくるんです。
それで最終的に、誰でも自分の望む形で生きられる世界、そういうものへの憧れがすごく強くなってきました。
そんな中、僕が小学校5年生ぐらいの時に、手塚治虫さんの「ブラックジャック」という漫画にはまり、それで医療に興味を持ちました。
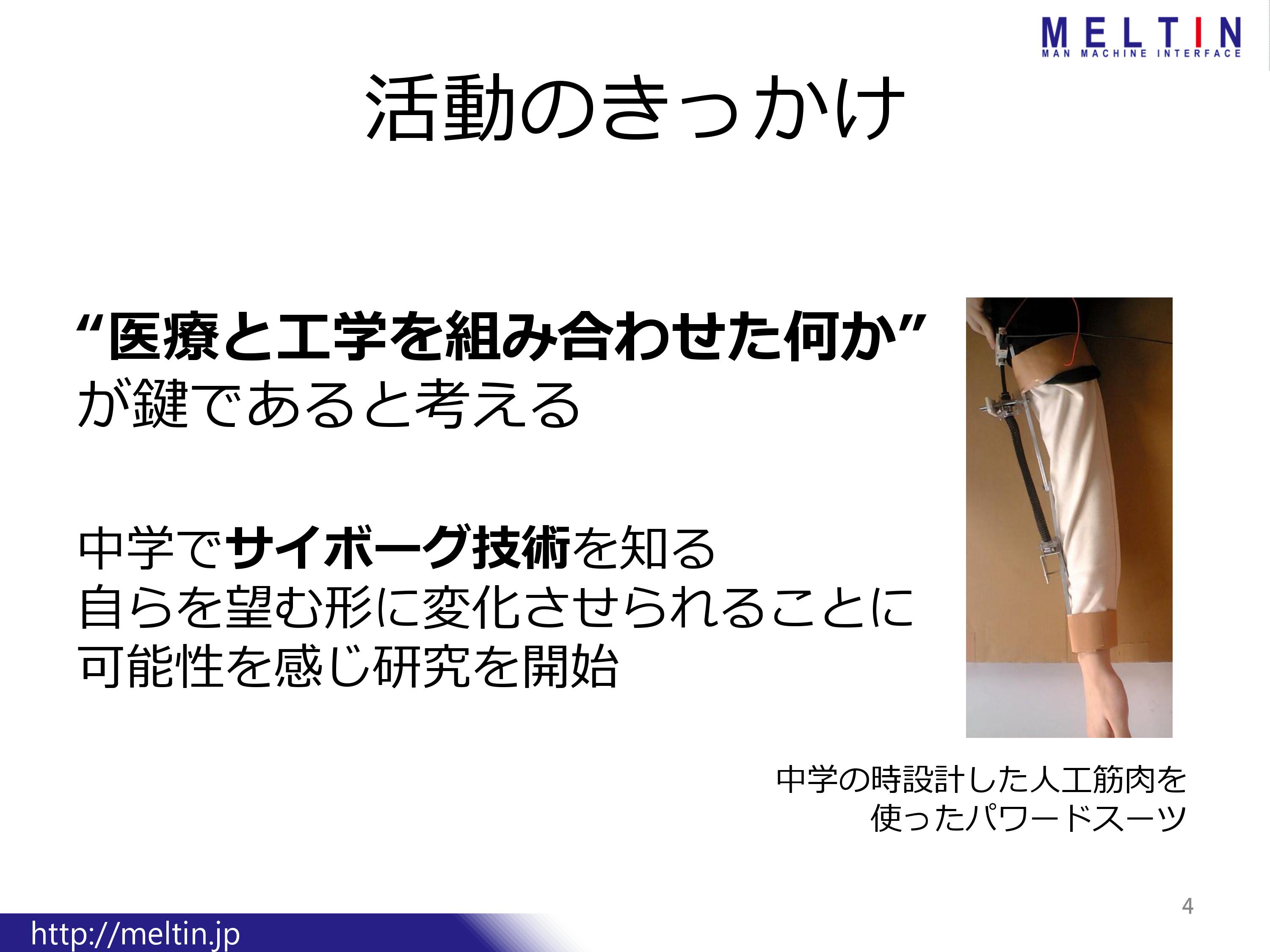
そこで、ロボット博士になりたいというのが元々ありましたから、医療と工学を組み合わせると何か将来面白いことができそうだぞ、ということを漠然と思い始めました。
その漠然とした思いが具体化されたのが中学校の頃です。
この頃に、サイボーグ技術というものがあることを知りました。この技術があれば自分というものを望む形で組み替えることができる、そういう可能性を感じ、当時から人工筋肉の設計等をやりながら自分で研究をしてきました。
そして今やっているのが、このような義手です。
自分の手のように直感的に操作できる義手を開発
積み木をしたり洗濯ばさみを使ったり、という日常生活の動きや、右上の動画にあるように食器を取り出したり重いものを持ち上げたり、そういうことが自分の手のように直感的に操作できる義手を今開発しています。

▶メルティン MMIのYouTubeチャンネルも是非御覧ください
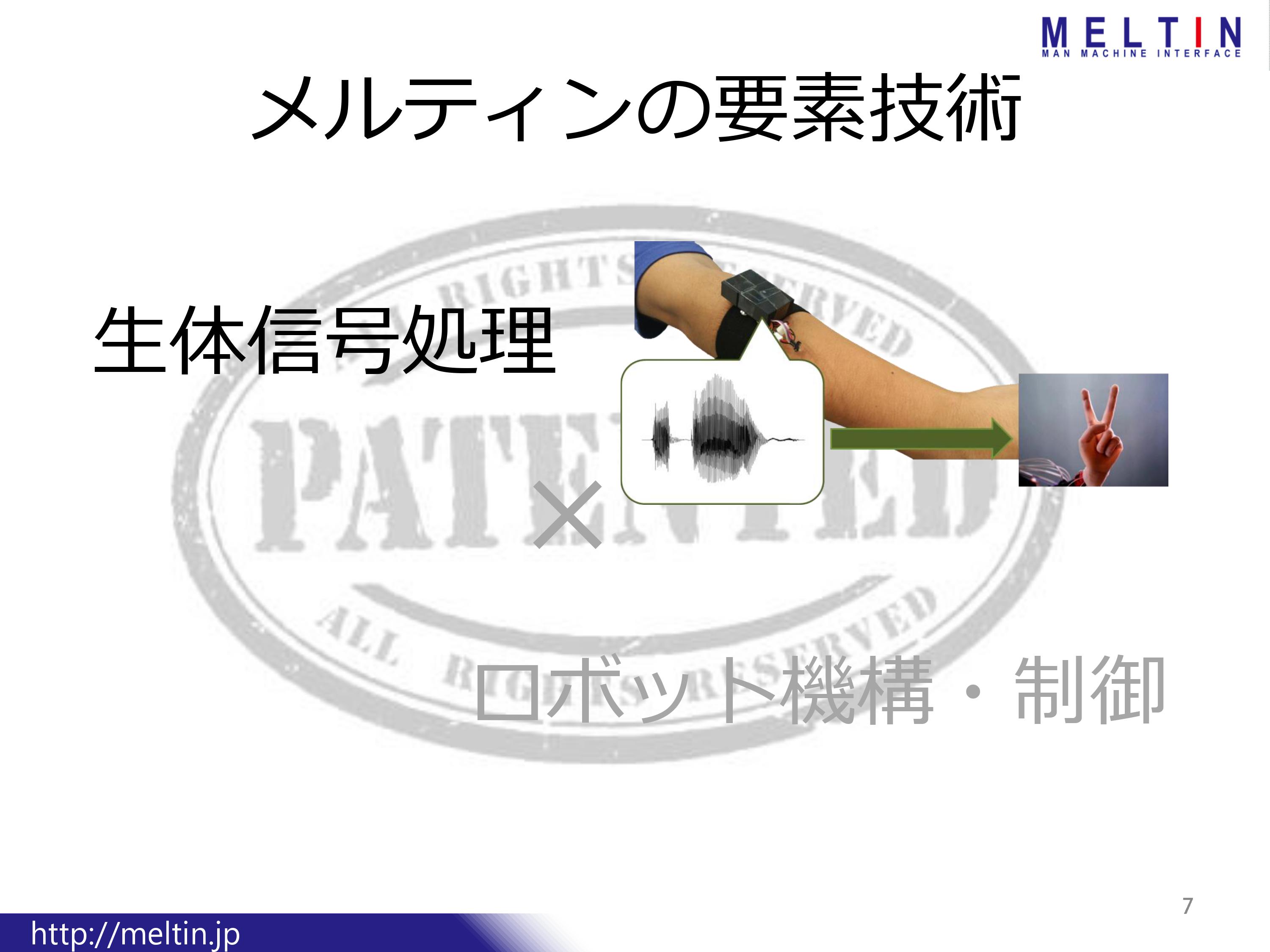
この義手を開発する要素技術として必要なのが、生体信号処理技術とワイヤ干渉駆動制御技術です。
ちょっと難しいような言葉が出てきましたが、要は生体信号処理というのは、人の身体を流れている電気信号を解析することによって機械を制御するテクノロジーです。
次にワイヤ干渉駆動制御ですが、実は人の身体はからくり人形に近くて、手を動かした時に腕の真ん中辺りを触るとちょっとピクピク動くのが分かると思いますが、実は人の手や指を動かす筋肉は手のひらにあるのではなく、前腕の辺りにあります。

この筋肉からワイヤーが伸びていて、そのワイヤーが引かれることで手が動いています。
その構造をお手本に、機械ならではの工夫をこらしたものがこちらの技術になります。

高度な生体信号処理により多彩な動きが義手で可能
まず、生体信号処理技術ですが、通常の義手は基本的に筋電の大小しか見ていません。
例えば筋電計をこの図のように2つ貼り付け、筋電計1が反応していればパー、2が反応していればグーといった大まかな形でグーパーを制御しています。
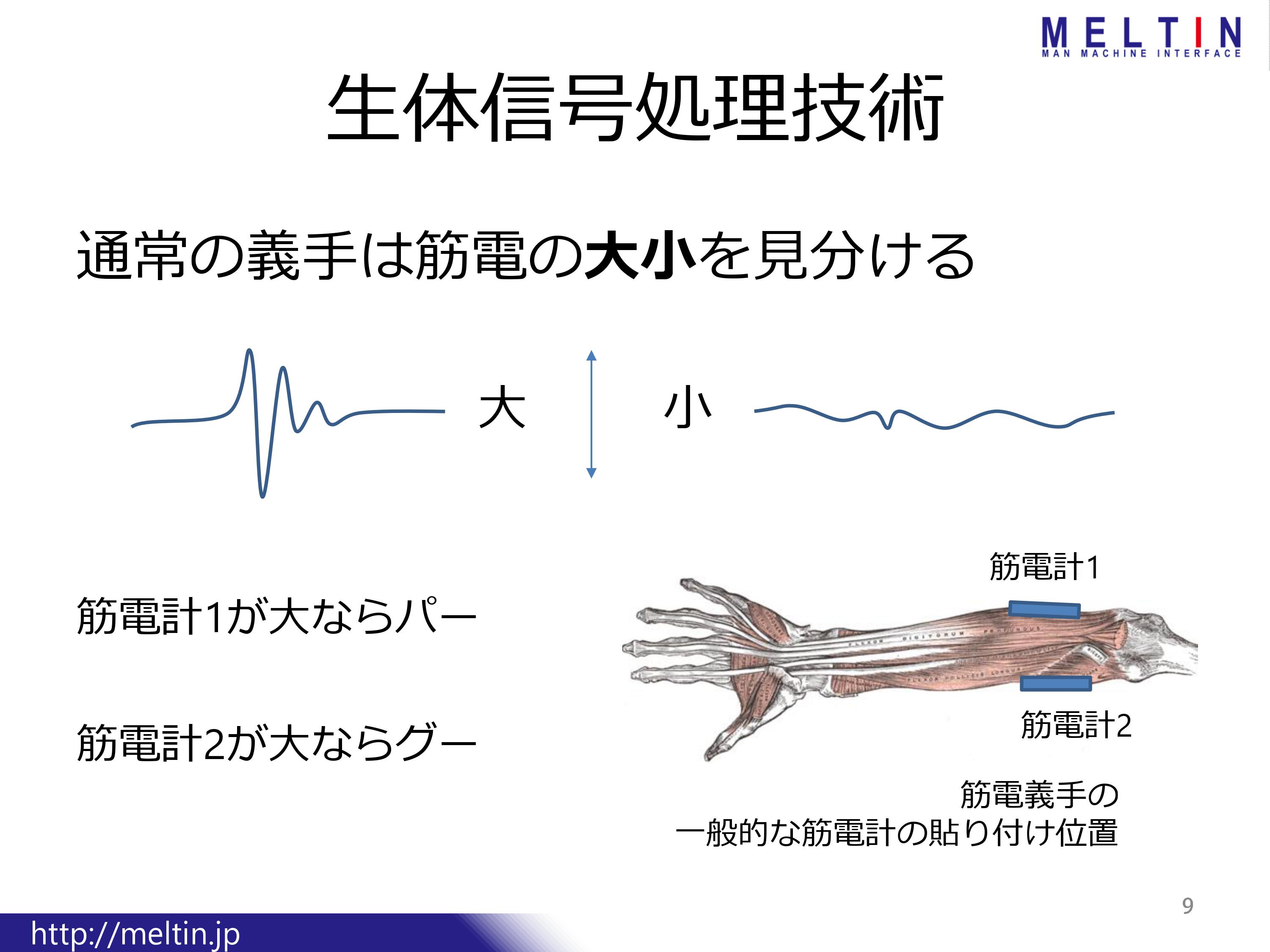
それに対してメルティンは、筋電の種類を見分けられます。単純に筋電が出ている、ではなくて、どういう筋電が出ているかが分かります。
この信号はグーだとかチョキだとか、それが分かることによって、グーパー以外の非常に多彩な動きを作ることができます。

メルティン義手は握力や関節の自由度で驚異の性能を誇る
そしてもう1つワイヤ駆動の方ですが、これによって非常にパワフルなロボットが作れます。
スライドの右上のグラフを見てください。
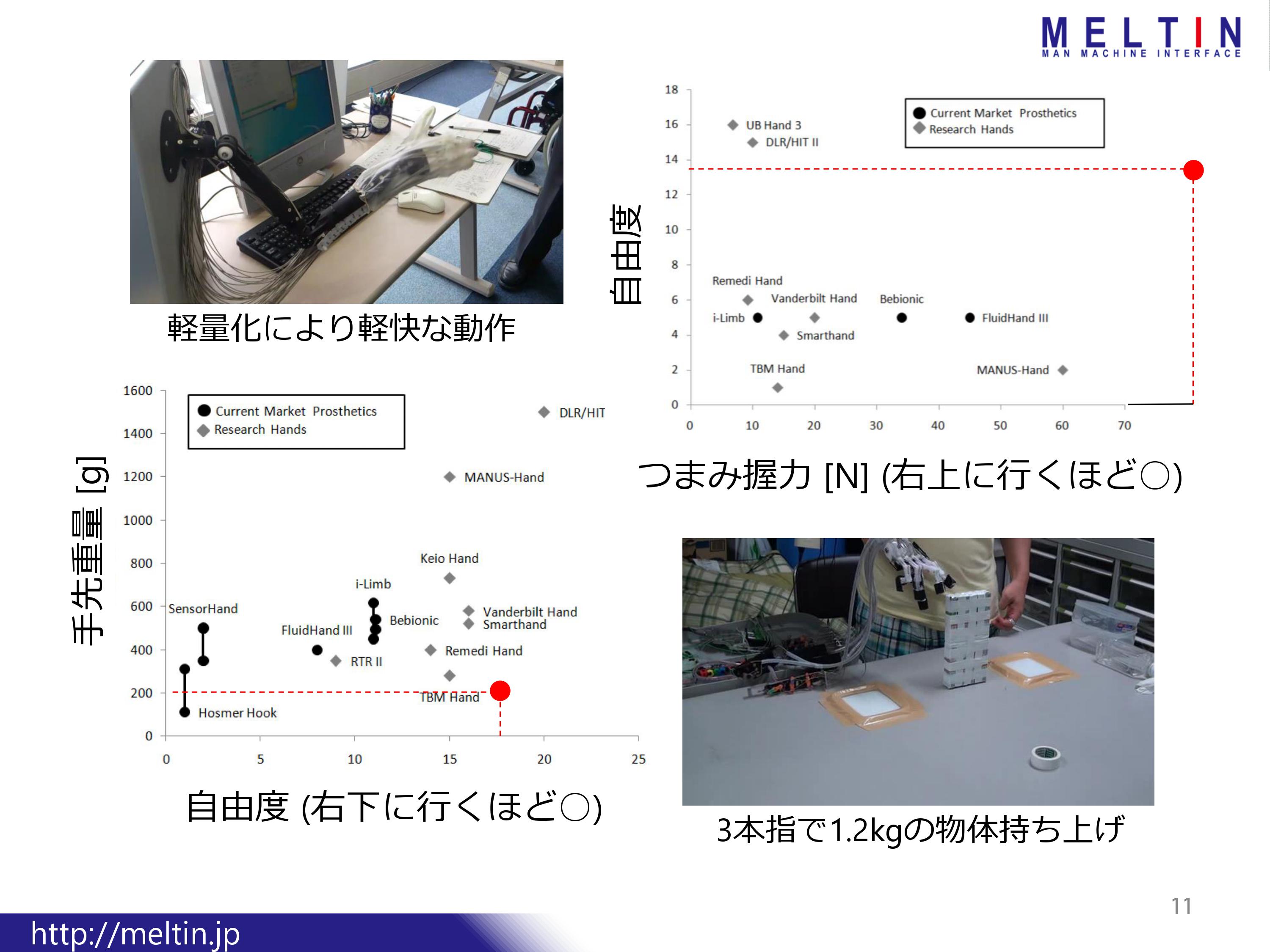
グラフでは、縦軸が関節の自由度、どれくらいの数の関節が動かせるか、そして横軸がどのくらい握力が出るかということです。
比較のため、他のロボットハンドの値は点でうっています。僕たちは、スライドのグラフで、赤い点の辺りにいます。規格外というか、欄外にいます。
右下の画像で1.2キロぐらいのものを持っていますが、3本の指でこの重さを掴むのは人がやっても結構辛いと思います。
そのようなスペックでありながら、重量も非常に軽くなっています。左下のグラフを見てください。
自由度は高いのですが、重量は軽い。
それによって上の画像のように軽快な動作ができるようになっています。
生体信号処理×ロボット機構・制御といった技術を開発してきたわけですが、僕個人の研究の歴史とは別に、基となった大学の研究の推移はこのような感じになっています。
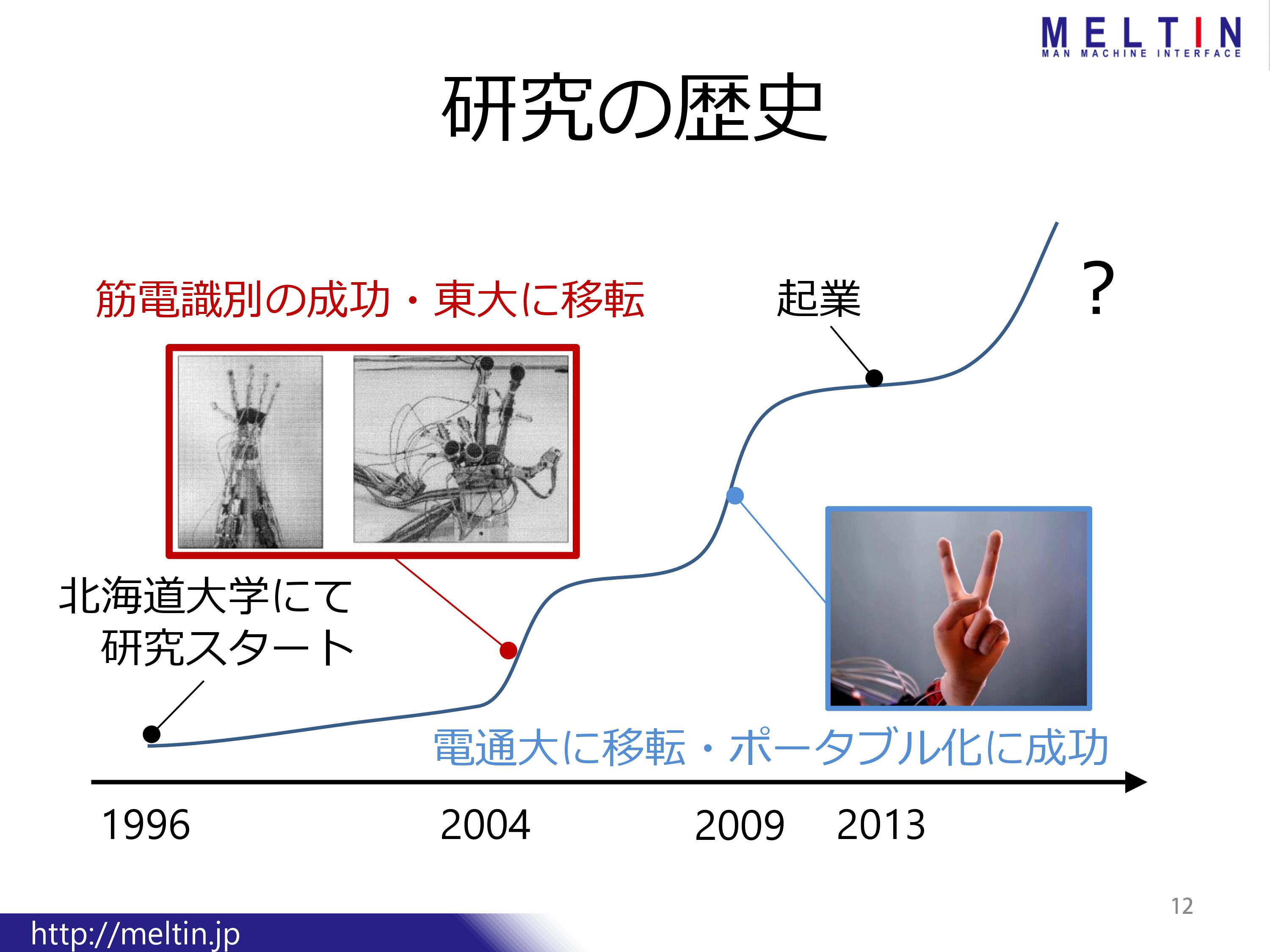
元々は96年に北海道大学で研究が始まりました。
そして2004年頃、筋電識別が上手くいきはじめて、東京大学に研究室が移転しました。ただ、この段階ではこのシステムはコンピュータで動いていたのみで、実用化にはまだ遠かったのです。
2009年、電気通信大学に移転してきた頃に、ポータブル化に成功しました。ポータブル化ができたのであれば実用化も近いだろうということで、2013年に起業したという流れになります。
▶メルティンMMI粕谷昌宏さんのプレゼンテーション動画をぜひご覧ください。
(続)
続きは 「身体を動かす信号のデータベースを創る」メルティンMMIの野望 をご覧ください。

▶平日 毎朝7時に公式LINE@で新着記事を配信しています。友達申請はこちらから!
▶ICCの動画コンテンツも充実! ICCのYoutubeチャネルの登録はこちらから!
編集チーム:小林 雅/榎戸 貴史/戸田 秀成/横井 一隆/立花 美幸/城山 ゆかり
【編集部コメント】
生体信号は、人間の体と精神(脳)をつなぐもので、それがここまで精緻に分析されると、義手など身体機能を補うのではなく、人間を拡張・強化する方が楽しみです。既にパワードスーツなどありますが(榎戸)
他にも多く記事がございますので、TOPページからぜひご覧ください。
更新情報はFacebookページのフォローをお願い致します。
