▶新着記事を公式LINEでお知らせしています。友達申請はこちらから!
▶ICCの動画コンテンツも充実! Youtubeチャネルの登録はこちらから!
ICCサミット FUKUOKA 2020 AIカタパルトに登壇いただいた、inaho 菱木 豊さんのプレゼンテーション動画【inahoは“進化し続ける野菜収穫AIロボット”で世界の農業を変える!】の文字起こし版をお届けします。ぜひご覧ください!
ICCサミットは「ともに学び、ともに産業を創る。」ための場です。毎回250名以上が登壇し、総勢900名以上が参加する。そして参加者同士が朝から晩まで真剣に議論し、学び合うエクストリーム・カンファレンスです。 次回ICCサミット KYOTO 2020は、2020年8月31日〜9月3日 京都市での開催を予定しております。参加登録などは公式ページをご覧ください。
本セッションは、ICCサミット FUKUOKA 2020 プラチナ・スポンサーの日本アイ・ビー・エム様にサポートいただきました。
▼
【登壇者情報】
2020年2月18〜20日開催
ICCサミット FUKUOKA 2020
Session 8B
AI CATAPULT 注目のAIスタートアップが勢揃い
Sponsored by 日本アイ・ビー・エム
(プレゼンター)
菱木 豊
inaho株式会社
代表取締役CEO
公式HP | STARTUP DB
1983年生まれ。鎌倉育ちの鎌倉っ子。大船高校を卒業後、大学在学中にサンフランシスコに留学し、帰国後東京調理師専門学校に転学。卒業後に不動産投資コンサルタント会社に入社。4年後に独立。2014年に株式会社omoroを設立。音楽フェスの開催、不動産系Webサービスを開発運営後に売却し2017年に解散。2014年に人工知能の学習を開始し、2015年に地元鎌倉の農家との出会いから、農業AIロボットの開発を着想。全国の農家を回りニーズ調査を進め、2017年1月にinaho株式会社を設立。鎌倉を拠点に、世界初のアスパラガスやキュウリ等を汎用的に収穫できるロボットを開発。収穫ロボットを軸として、一次産業全般のAIロボティクス化を進めている。
▲
▶「ICC FUKUOKA 2020 AIカタパルト」の配信済み記事一覧
菱木 豊さん inaho(イナホ)の菱木です。よろしくお願いいたします。

我々は「テクノロジーで農業の未来を変える」ことに取り組んでいます。

AIロボットが“3つの目”で農作物を探索し、自動収穫
まずはこちらの動画をご覧ください。
我々は、自動野菜収穫ロボットを軸とした農業プラットフォームを展開しています。
このように人が1本1本手で収穫しているものを、ロボットを使って自動収穫します。
ロボットに搭載されているAIが、農作物の長さやX,Y軸のどの座標にあるかを見て、収穫してもよいかどうかを判断するのです。
もう少し詳しくご説明すると、ロボットの側面にセンサーとカメラがついており、ロボットはこれらを使って画像を認識します。
問題は、認識する際に「日光」が邪魔になることです。
特に太陽光が差し込む日中は、カメラが白飛びしてしまい、収穫対象をきちんと認識して収穫することができなくなってしまいます。
しかし我々は、現場での試行錯誤を経てその問題を改善しました。
今世界中を見渡しても、弊社のように日中の太陽光下での収穫を可能にした自動野菜収穫ロボットはなかなか見当たりません。
さらに我々は、ディープラーニングの技術を使い、どれが実でどこが切るべき部分かをロボットに判別させて収穫しています。
おかげさまで、メディアにも数多く取り上げていただいています。

収穫の手間が大きな「選択収穫野菜」をターゲットに
我々がターゲットとしているのは、トマト、キュウリ、ナス、ピーマンといった、皆さんが日常的に口にされている野菜です。

これらは全て「選択収穫」が必要な野菜で、通常は人が目で見て手で収穫するという、大変な作業を要します。
我々は、ロボットの認識性能や精度を上げることで、この「選択収穫」をロボットが自動で行えるようにしたいと考えています。
収穫繁忙期の偏りのため、農業は通年雇用が難しい
話は戻りますが、我々がなぜこの収穫ロボットを手がけているかについてお話しします。
野菜の収穫作業は、農家の作業時間の5割から6割を占めています。この作業はとにかく大変なのです。
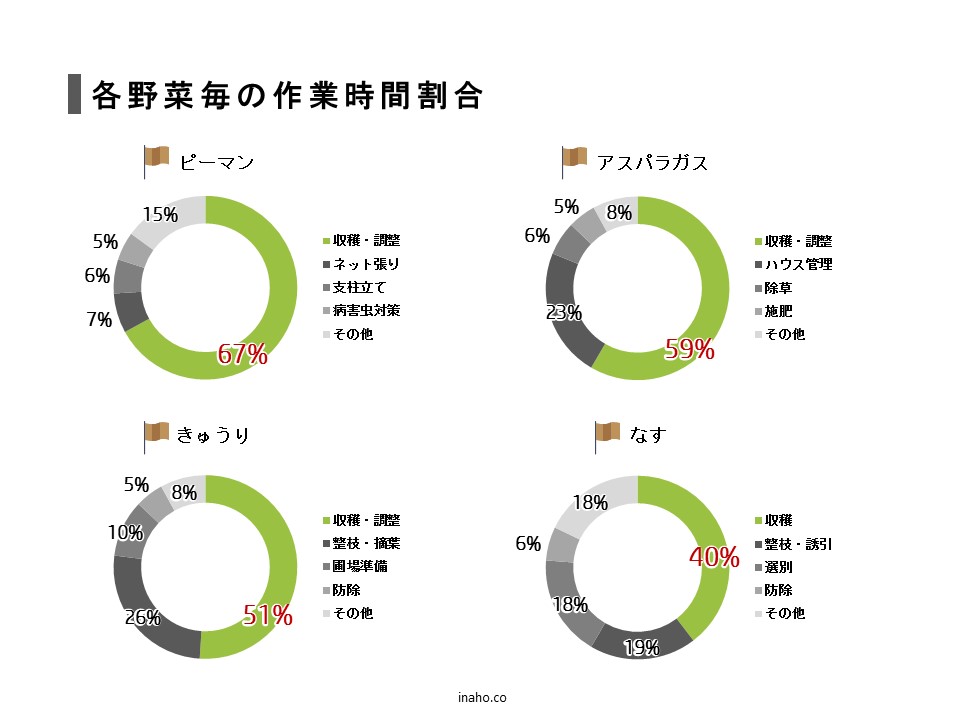
我々は、この作業を効率化することが農業における最も大きなソリューション、そしてインパクトになると考えています。
実際に、農家の皆さんが年間を通してどのくらい収穫作業をされているのかを見てみましょう。

黄色い矢印で示されたように、年間8カ月から9カ月の間、ほぼ毎日収獲されています。
これを見るとかなり大変そうですが、もちろんパートさんなどを雇用して収穫作業をされています。
ただ問題なのは、3〜4カ月間の仕事がない期間が生まれることです。
これは雇われる側にとっても問題です。年間8〜9カ月間しかない仕事に就くよりは、1年間安定した雇用を提供する場所で働きたいと思います。
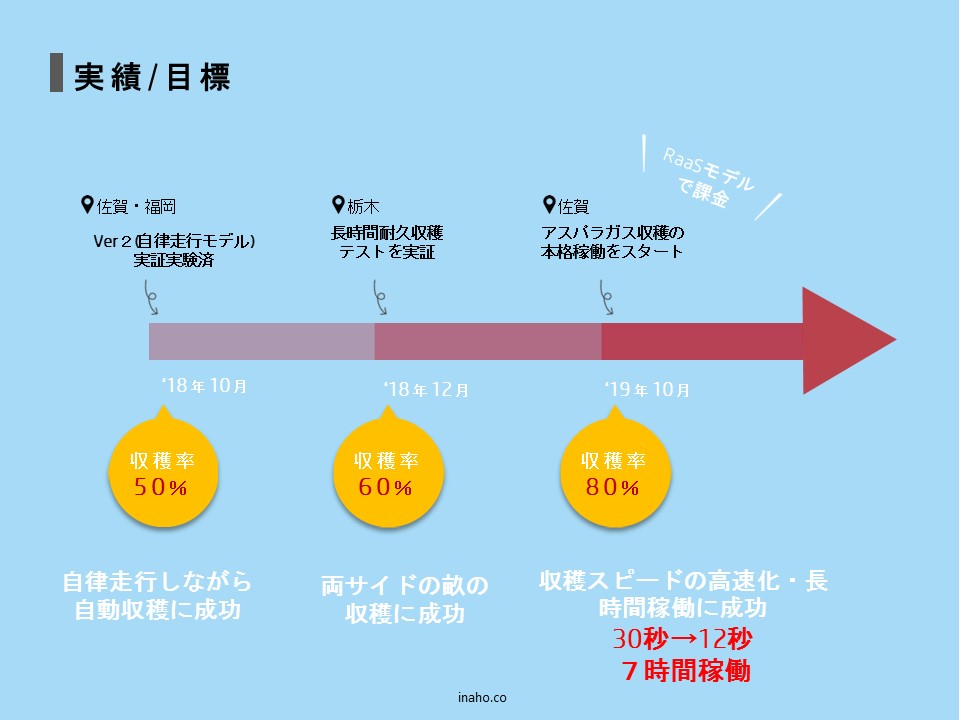
収穫高に応じて課金する“RaaSモデル”でロボット提供
そこで我々は、農家の皆さんが必要な時だけ使えるロボットがあったらよいのではないかと思い、ロボットの収穫高に応じてサービス料を徴収するRaaS(Robot as a Service)を提供することにしました。
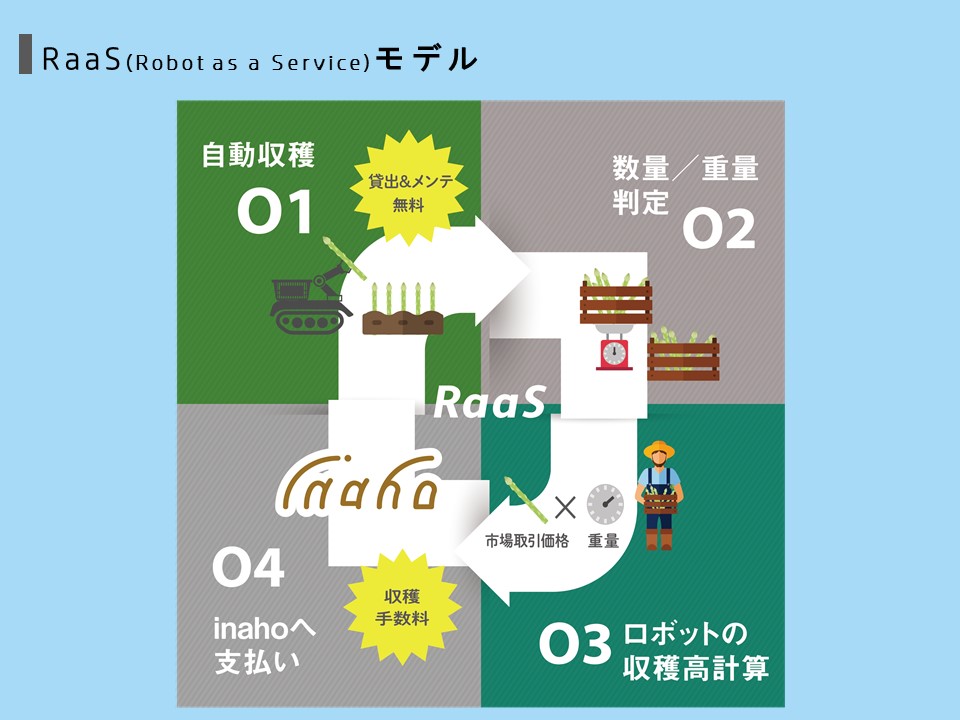
このRaaSモデルでは、1本1本の収穫についてログデータが残されます。
例えば、キュウリが1本約100グラムだとすると、100本収穫したら約10キロ収穫したことが分かります。
キュウリの取引価格は毎日大田市場などに出ていますが、キロ単価が約300円ですのでロボットが3,000円分収穫したことになり、我々はマージンとしてその15%分である450円をいただく仕組みになっています。
仮にロボットが1,000万円分の野菜を収穫したら、我々は150万円をいただくことになります。
実際に1,000万円分を収穫するのにかかる人件費が約180万円だとすると、農家さんはロボットを使うことでコストを抑えることができます。
しかし我々は、人件費を安くすることだけを考えているわけではありません。
仮にロボットが3人分の働きをすれば、雇う人が半減しても作付面積を2倍にし、所得を2倍にすることができるのです。
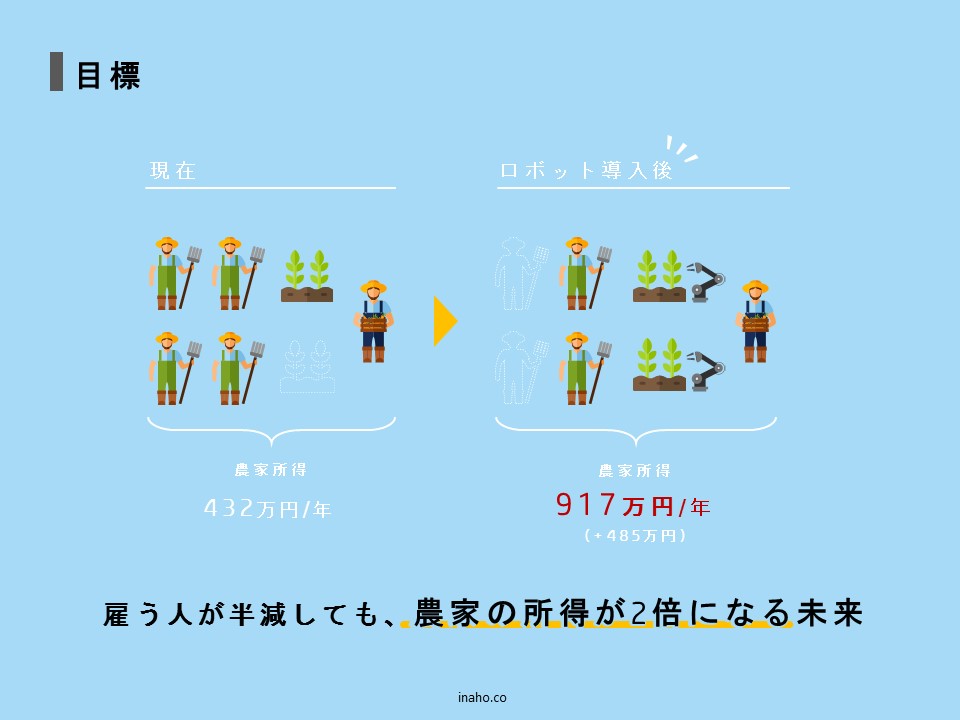
そのような未来を、皆さんと一緒につくっていきたいと考えています。
ロボットの性能が向上すれば、農家の収益も上がる
我々はハードウェアをつくっていますが、立場はあくまでサービス事業者です。

このモデルの良いところは、ハードウェアだけでなくソフトウェアも改良しアップデートていけるところです。

ソフトウェアとハードウェアの性能を向上させていくことで、例えばロボットが規格外品も判別できるようになり、収穫率も上がります。
我々のロボットには「完成形」ではありません。

次のスライドに示されるように、2018年には50%だった収穫率が、2019年には最大80%にまで上昇しています。
AIによる学習を続け、認識・収穫精度をアップデート
また、ロボット運用時のエラーをなくす取り組みも行っています。
これはアスパラガスの収穫時の様子で、所々に表示されている緑のボックスが、AIの目としてアスパラガスの穂先を検知しています。

当初は、ロボットが手前の銀色のポールをアスパラガスの芽と誤判別して収穫に向かってしまうというエラーが起きていました。
しかし、今ではこの穂先をきちんと検出できるようになり、「穂先があるものが収穫対象である」ことが分かるようになりました。
通常のカメラやセンサーだけでは分からなかったものが、AIによって判別できるようになったのです
こちらは、キュウリの収穫実験の様子です。

キュウリ畑は緑一面ですが、ディープラーニングの技術で、ロボットはどれが実でどの部分を切ればよいのかを識別しています。

ナスについても、このように一つひとつ形を学習させていくことで、ロボットが上手く識別できるようになります。
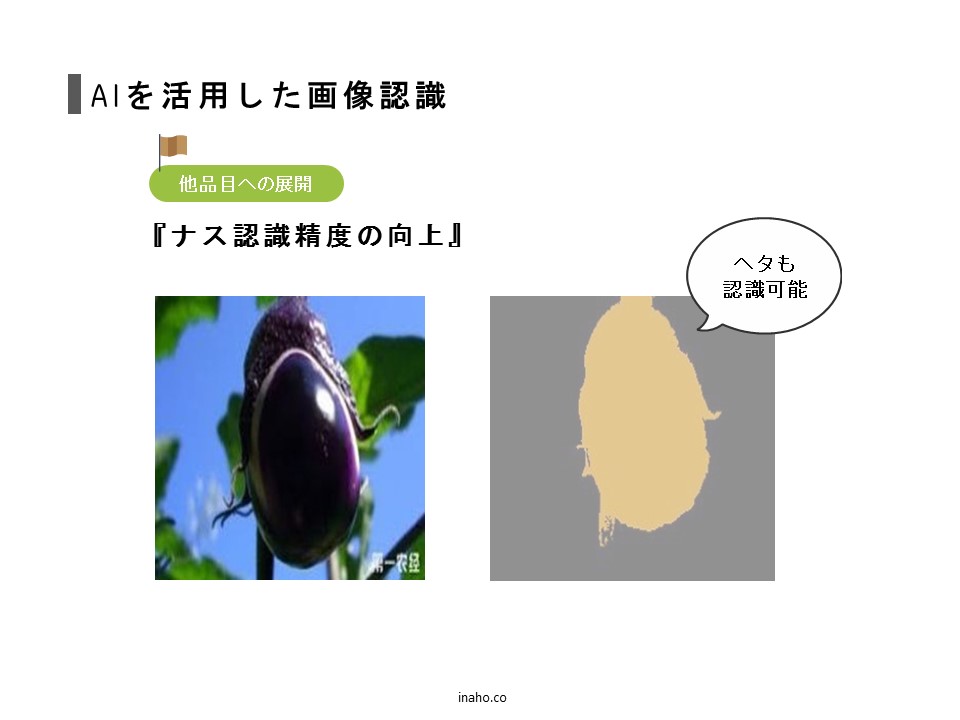
ただ、次のように重なって見えない実がある場合が問題です。

自然相手なので仕方ありませんが、このような場合には、ロボットは見えている一部分から全体を推測してナスを判別します。

日本発のテクノロジーで、世界の農業の未来を変える
2020年は、ロボットを量産していく予定です。
オランダへの展開も進めます。

オランダの農家は、1軒平均の売上が10億円ほどです。
今まではポーランドからの移民の方を時給20ドルで雇用していたのですが、その人手が確保できなくなり、ブルガリアやルーマニアなどの貧民国に人手を求めるようになったそうです。
このような部分をテクノロジーで解決しようとしています。
以上です。ありがとうございました。
(終)
▶新着記事を公式LINEでお知らせしています。友達申請はこちらから!
▶ICCの動画コンテンツも充実! Youtubeチャネルの登録はこちらから!
編集チーム:小林 雅/尾形 佳靖/フローゼ 祥子/道下 千帆/戸田 秀成
更新情報はFacebookページのフォローをお願い致します。