▶新着記事を公式LINEでお知らせしています。友だち申請はこちらから!
▶ICCの動画コンテンツも充実! YouTubeチャンネルの登録はこちらから!
ICC FUKUOKA 2022 REALTECH CATAPULTに登壇いただいた、ソラリス 梅田 清さんのプレゼンテーション動画【空気の力で動く人工筋肉ロボットで、複雑な作業にしなやかに適応する「ソラリス」】の文字起こし版をお届けします。ぜひご覧ください!
ICCサミットは「ともに学び、ともに産業を創る。」ための場です。毎回300名以上が登壇し、総勢900名以上が参加する。そして参加者同士が朝から晩まで真剣に議論し、学び合うエクストリーム・カンファレンスです。 次回ICCサミット KYOTO 2022は、2022年9月5日〜9月8日 京都市での開催を予定しております。参加登録は公式ページをご覧ください。
本セッションは、ICCサミット FUKUOKA 2022ゴールド・スポンサーの KOBASHI HOLDINGS にサポートいただきました。
![]()
▼
【登壇者情報】
2022年2月14〜17日開催
ICC FUKUOKA 2022
Session 7A
REALTECH CATAPULT
リアルテック・ベンチャーが世界を変える
Sponsored by KOBASHI HOLDINGS
梅田 清
株式会社ソラリス
代表取締役CEO兼COO
1973年広島県出身。1997年岡山大学大学院工学研究科修了後、キヤノン株式会社入社。同社にて家庭用インクジェットプリンタの画像処理開発および製品設計に従事。2015年同社設計室長。2018年、自らを鍛え直すため、21年働いた大手を飛び出しKyoto Robotics株式会社入社。開発部長として最新物流センター向け自動デパレタイズシステムの立ち上げに尽力し実稼働に成功、同システムは2020年ロジスティクス大賞を受賞。2020年株式会社ソラリスに参画、2020年11月同社取締役COO、2021年4月同社代表取締役に就任、現在に至る。3人の息子を持ち、趣味はジャズピアノ。
▲
梅田 清さん 株式会社ソラリスです。
「柔能(よ)く剛を制す」
「やわらかくしなやかに動くソフトロボット」について、代表の梅田がご説明をさせていただきます。
「ソフトロボット」とはどんなロボット?
まず最初に、我々がなぜソフトロボットというものに着目するのかについて、お話をさせていただきます。
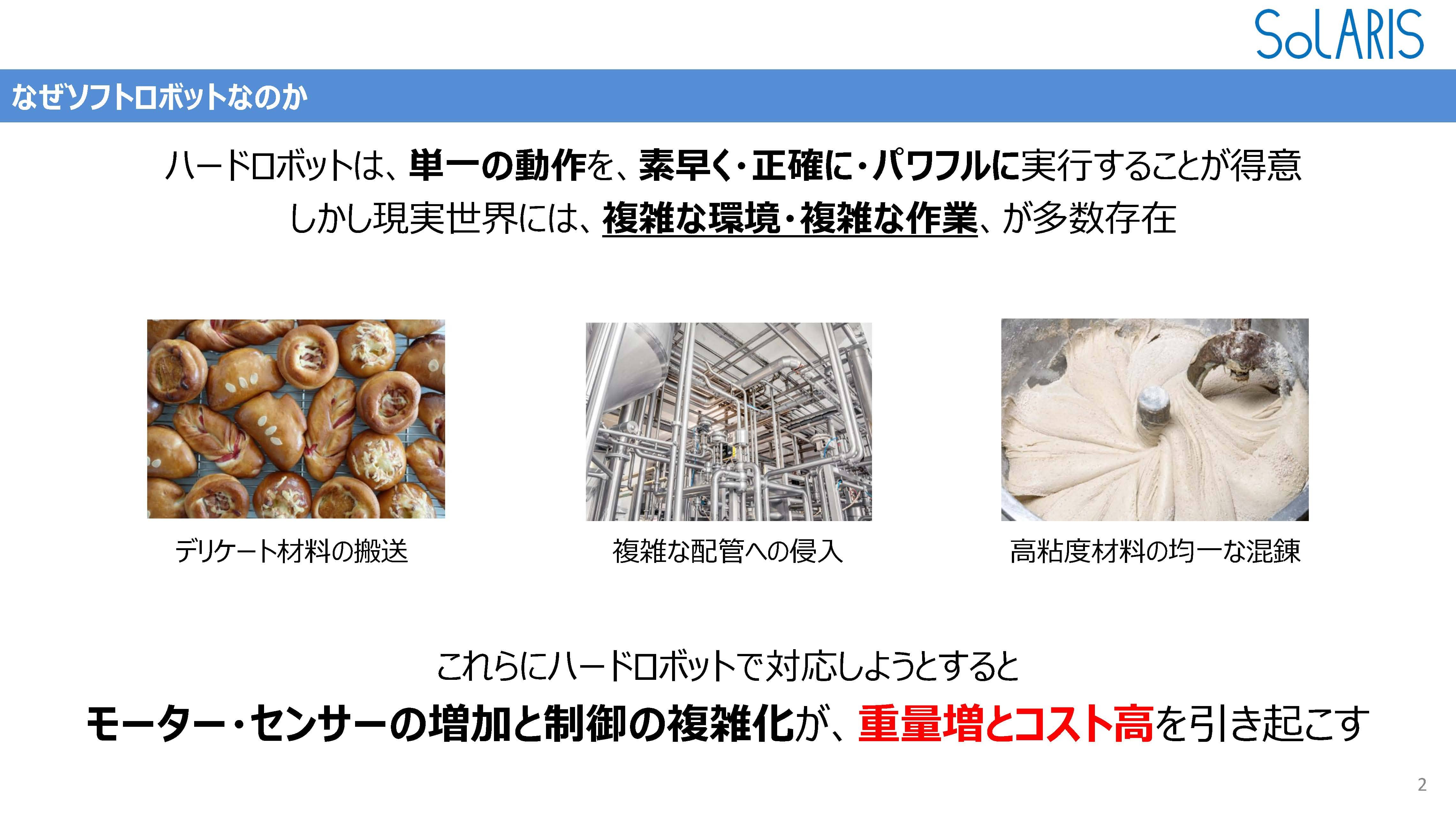
ソフトロボットの逆は硬いロボット、つまり「ハードロボット」ですが、このハードロボットはあらかじめ定められた単一の動作を素早く正確にパワフルに実行することが得意だと思います。
しかし現実世界には、それでは賄いきれない複雑な環境や作業が多数存在すると思っております。
例えば、「左側の、形も大きさも違うパンを自動で運びなさい」。
これはなかなか難しい作業になります。
それから中央の、「複雑で細く曲がりくねった配管に進入しなさい」。
これもかなり難しいです。
それから右側の、「非常に粘度の高い材料を均一に混ぜなさい」。
これも熟練の技が必要になります。
こういったものをハードロボットで対応しようとすると、どうしてもモーターやセンサーをたくさん付けて、複雑なフィードバック制御を行って、それにより重量増とコスト高を引き起こす、こういった課題があると思います。

一方、我々が着目するソフトロボットは、やわらかくしなやかに動作して、アナログかつアバウトな制御で、複雑な環境や作業にロボット自らが適応していきます。
これがソフトロボットの魅力だろうと考えております。
実際、先ほどのパンの事例では、こういったソフトハンド、ソフトグリッパーのようなものも登場して活躍をしていると思います。
我々はその他の課題を、独自のソフトロボティクス技術によって解決して参りたいと考えております。
世界初の独自構造をもつ「人工筋肉」を開発
こちら、動いているのが、我々のソフトロボットのコア技術である「人工筋肉」です。
中央大学と独自開発をした人工筋肉は、一見するとただの黒いゴムチューブですが、そのチューブの中に世界初となる独自構造を備えており、空気を入れると、このように膨らんで、短くなります。
▶高出力型空気圧人工筋肉の開発(中村研究室)
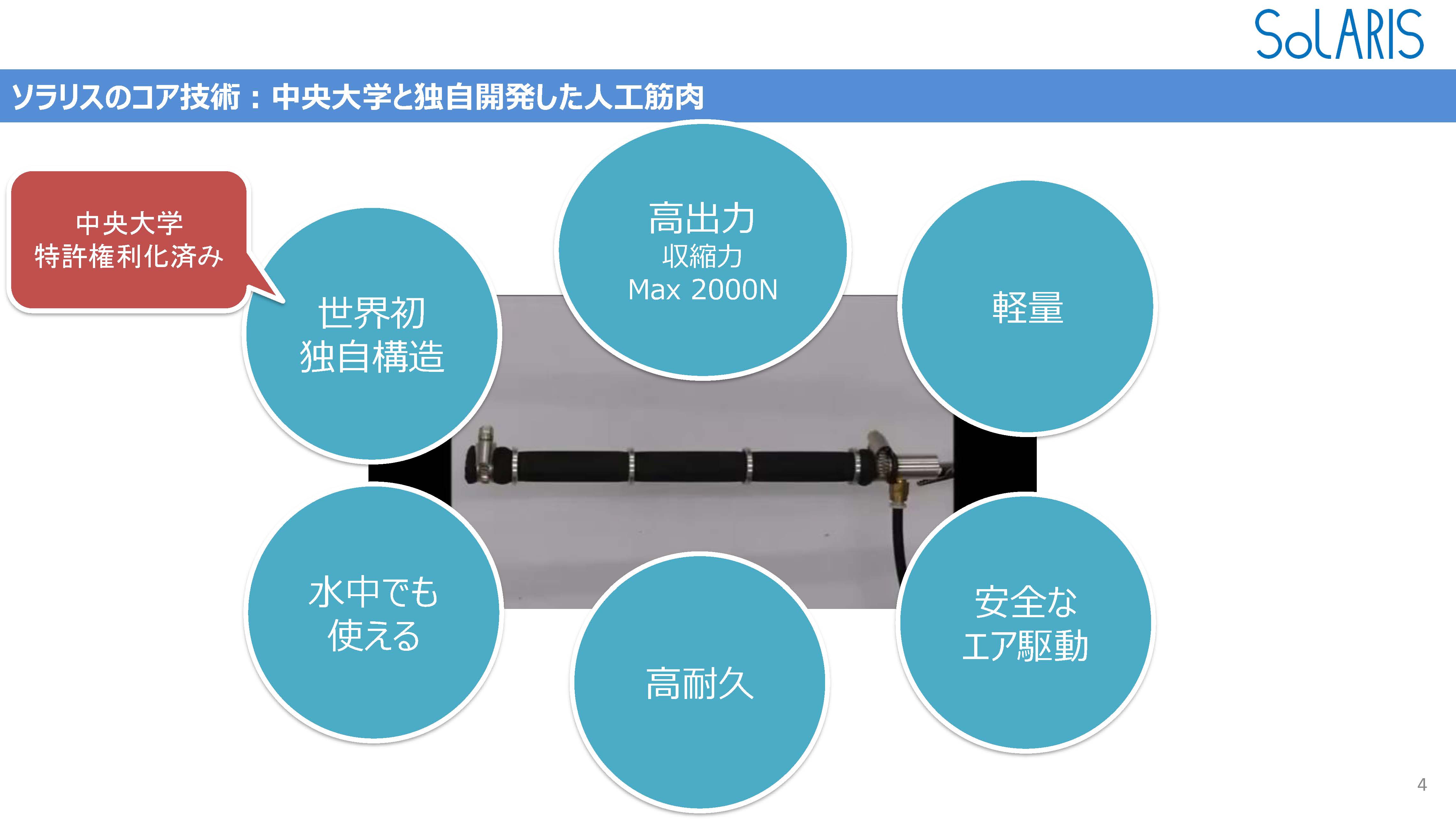
短くなるときの収縮力が最大2,000ニュートン(荷重、加速度の単位。1ニュートンは1kgの質量の物体に1m/s2の加速度を生じさせる力)と非常に高出力で、かつ軽量で安全な空気の力で動き、高耐久で水中でも使えるということで、さまざまな用途が期待されている部材です。
腸の動きを応用した「蠕(ぜん)動運動ポンプロボット」
我々はこちらの空気圧人工筋肉を使って、世にも奇妙なソフトロボットの開発に取り組んでおります。

その奇妙なロボットのうちの1つ目が、こちらの、人間の腸の動きを模倣した「蠕動運動ポンプロボット」になります。
まさに世界でも類を見ないOne and Onlyのデバイスとなっており、腸の動きを利用して超高粘度材料やスラリー(※) の搬送、あとはすぐ壊れてしまうようなデリケートな材料も優しく運びます。
▶編集注:スラリーとは元来泥、粘土、セメントなどに水を混ぜたのり状またはかゆ状のものを意味するが、通常、固体粒子と液体との混合物やサスペンション流体をさす(機械工学辞典より)。
また非常にせん断力の低い安全な混錬システムを提供し、ユニット単位で、上下左右自由に接続できるので、省スペースという特徴があります。
大腸の動きを使って、これまで難しいとされていた、いろいろな課題にチャレンジをしております。
例えば1つ目、こちらはロケットの「固体推進薬」、つまり燃料です。
これを混ぜるプロジェクトです。
固体推進薬は非常に粘度が高くて、均一に混ぜるのが非常に難しいです。
これを我々の大腸ロボット(蠕動運動ポンプロボット)を使って均一に混ぜようと、何年か前に、ある学会で報告したところ、有識者の方から、「君、そんなのできるわけがない」「混ざるわけがないだろう」というふうに言われました。
つまり、誰もできるとは思っていません。
だからこそやる価値があると思って、今も秘密裡に取り組んでおります。
▶中央大学とJAXA、大腸の蠕動運動を応用して固体ロケット燃料を安価に混ぜて捏ねて運ぶ製造手法を開発 ソフトロボティクスと宇宙開発のコラボ 2018年3月16日(ロボスタ)
夢の技術、土砂揚重の自動化にも挑戦
2つ目は、今大型の重機を使って行っている工事現場の地下の土砂の揚重(※) です。
▶編集注:揚重とは、資材・機材などを(クレーンなどで)引き上げること。 いわゆる荷揚げ・荷降ろしを意味する用語(Weblioより)。
これを我々のポンプを大型化して30m、40mつなげて、24時間人手をかけず、垂直方向に揚重するといった夢のような技術にもチャレンジをしております。
右側の動画は、原理確認の動画になりますが、本プロジェクトを成功させることによって、土砂以外のコンクリートや汚泥、廃棄物の搬送へ展開していく予定です。
壊れやすいものを優しく運ぶ
さらに、この大腸の動きで壊れやすい野菜(※動画はブロッコリーとカリフラワー)も優しく壊さないで搬送するので、本日これらの動画を見て、「こんなものが運べるんじゃないか」と思いついた方は、ぜひお声掛けいただければと思います。
電子部品は不要、曲がりくねった配管内も自律で進む
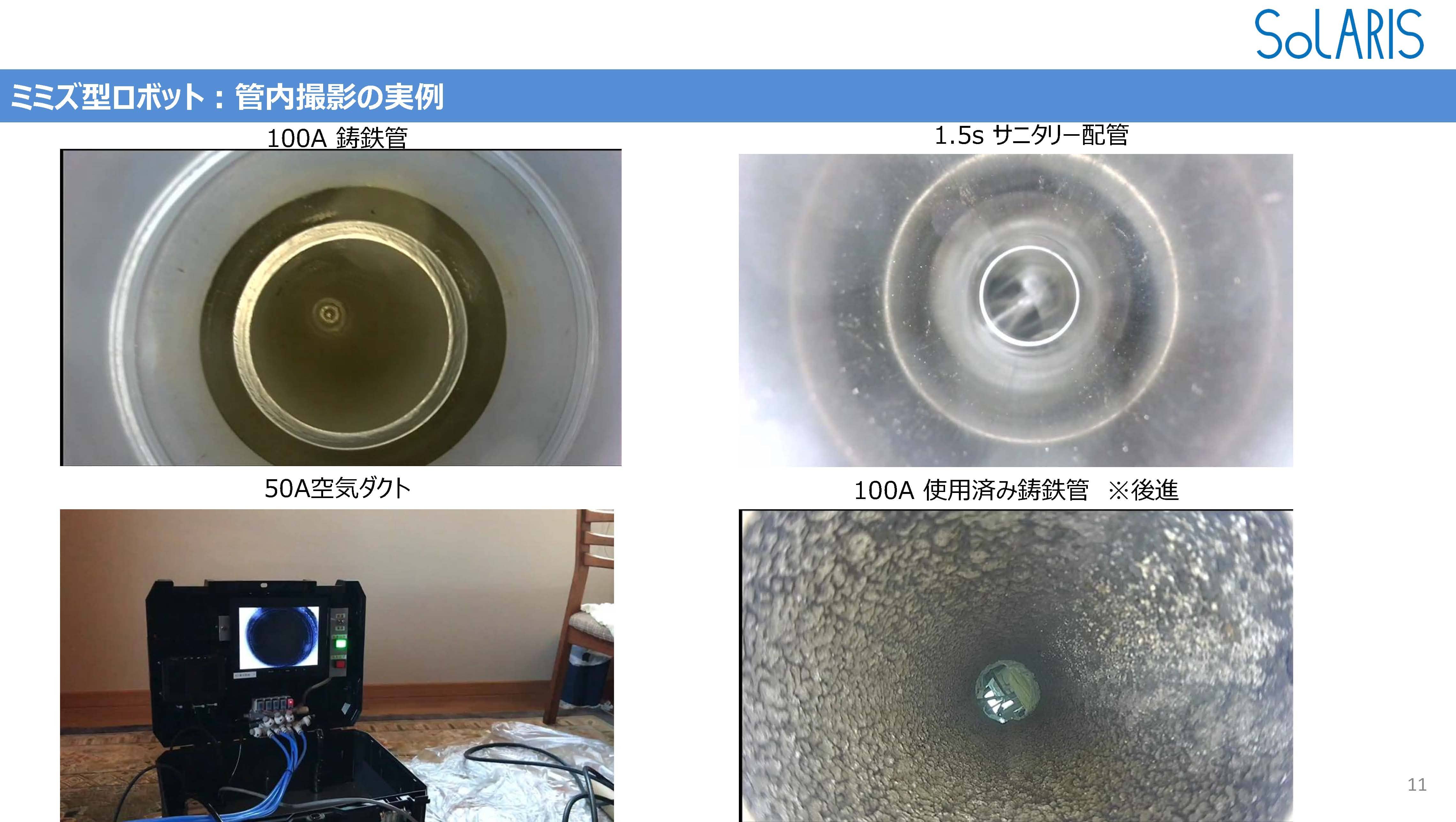
そして我々が取り組む2つ目のソフトロボットは、人工筋肉の特性をうまく利用して、まさにミミズのような動きを再現した「ミミズ型ロボット」になります。
我々の技術の特徴は、従来ではとても進入が難しかった、細く曲がりくねった配管(100mm以下を想定)などに、どんどん自律的に入って行って、かつ安全に、これも空気の力だけで動くというものです。
モーター、電子部品は一切不要です。
空気の力で進むので防爆性に優れ、かつこのロボットの本体が実は空洞になっており、その本体の空洞の所にいろいろな検査装置をビルトインして、今までになかった使い方ができます。
そういったまさに配管検査・清掃のプラットフォームになるロボットになっております。
ソフトロボティクスで新たな価値の創造を!
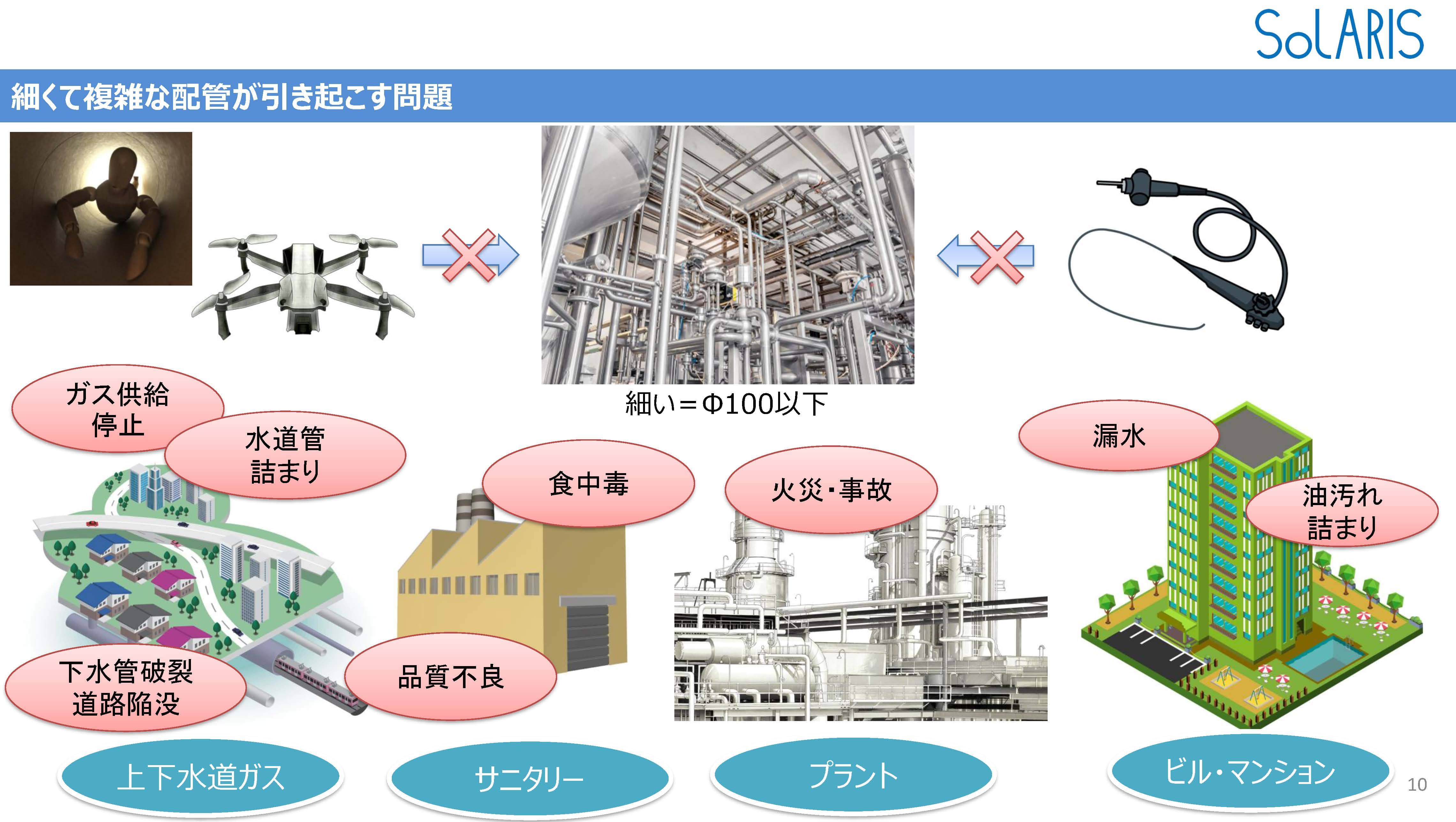
皆様ご存知のように、生活の周りには無数の配管が存在しており、細く曲がりくねったものも多数あります。
こういった中に進入することはなかなか難しいです。
最新鋭のドローンでもなかなか困難ですし、工業用内視鏡もなかなか難しい。それによって、今さまざまな現場でいろいろな点検、清掃ができないために、トラブルが多数発生しております。
こういったところに我々のロボットがどんどん進入をしていって、誰も見たことがない世界のデータを取得して、新たなDXの価値を創出したい、そんなふうに考えております。
本日はご静聴ありがとうございました。
日本がこのソフトロボティクスという比較的新しい世界で世界をリードしていくために、ぜひ一緒に新価値の創造をしましょう。
本日はありがとうございました。
(終)
▶新着記事を公式LINEでお知らせしています。友だち申請はこちらから!
▶ICCの動画コンテンツも充実! YouTubeチャンネルの登録はこちらから!
編集チーム:小林 雅/星野 由香里/浅郷 浩子/戸田 秀成/小林 弘美
更新情報はFacebookページのフォローをお願い致します。
≈
