▶新着記事を公式LINEでお知らせしています。友だち申請はこちらから!
▶ICCの動画コンテンツも充実! YouTubeチャンネルの登録はこちらから!
▶ICCパートナーズではコンテンツ編集チームメンバー(インターン)の募集をすることになりました。もし興味がございましたら採用ページをご覧ください。
「大人の教養シリーズ 人間を理解するとは何か?(シーズン4 )」全10回シリーズ(その2)は、今回の刺客、GROOVE X 林 要さんが話題の愛されロボット、LOVOTを連れて登場。人間はなぜLOVOTを可愛いと思うのか? 100億円かけた開発の過程で、林さんが人間の心や意識について学んだこととは? ぜひご覧ください!
ICCサミットは「ともに学び、ともに産業を創る。」ための場です。毎回200名以上が登壇し、総勢800名以上が参加する。そして参加者同士が朝から晩まで真剣に議論し、学び合うエクストリーム・カンファレンスです。次回ICCサミット FUKUOKA 2021は、2021年2月15日〜2月18日 福岡市での開催を予定しております。参加登録は公式ページをご覧ください。
ICCサミット FUKUOKA 2020のプレミアム・スポンサーとして、Lexus International Co.様に本セッションをサポート頂きました。
![]()
▼
【登壇者情報】
2020年9月1〜3日開催
ICCサミット KYOTO 2020
Session 2C
大人の教養シリーズ人間を理解するとは何か?(シーズン4)
Supported by Lexus International Co.
(スピーカー)
石川 善樹
公益財団法人Well-being for Planet Earth
代表理事
井上 浄
株式会社リバネス
代表取締役副社長 CTO
北川 拓也
楽天株式会社
常務執行役員 CDO (Chief Data Officer)
林 要
GROOVE X株式会社
代表取締役
(モデレーター)
村上 臣
リンクトイン・ジャパン株式会社
日本代表
▲
▶大人の教養シリーズ人間を理解するとは何か?(シーズン4)の配信済み記事一覧
連載を最初から読みたい方はこちら
1つ前の記事
人気シリーズ堂々第4弾!過去3シーズン「人間の理解」はいかに深まってきたか
本編
村上 トップバッターはなんと今回、“刺客”としてロボットを作っておられるGROOVE X 林 要さんからお願いします。
【今回の刺客】100億円かけてLOVOTを開発、GROOVE X 林要さん
林 要さん(以下、林) 今回“刺客”として来ましたGROOVE Xの林です。
▼
林 要
GROOVE X 株式会社
代表取締役社長
1973年愛知県生まれ。1998年トヨタ自動車入社、同社初のスーパーカー「レクサスLFA」開発プロジェクトを経て、2003年よりトヨタF1(Formula 1)の空力エンジニアに抜擢され渡欧。2007年トヨタ自動車にて量販車開発マネジメントを担当。11年、孫正義後継者育成プログラム「ソフトバンクアカデミア」外部第一期生に選出。2012年ソフトバンク入社、パーソナルロボット「Pepper(ペッパー)」のプロジェクトメンバーに登用される。2015年、ロボットベンチャー「GROOVE X」を起業。2018年12月、同社より人のLOVEを育む家族型ロボット『LOVOT[らぼっと]』を発表。4年の歳月と約100億円の開発費を費やし2019年12月より『LOVOT』の出荷開始。CES2020にて「INNOVATION AWARD」を受賞した他、『Refinery29』のBEST OF CES 受賞、グッドデザイン金賞受賞、babytech award2020 大賞受賞など国内外で注目を集めている。著書に『ゼロイチ』がある。
▲
北川 すごく楽しみにしていました。
井上 楽しみです!
林 そもそもこのロボットを作るのに100億円かかっていますが、皆さんは100億円をかけてロボットを作ろうという気になりますか?
石川 普通そんな気にならないですよね!
北川 全くならないです(笑)。
林 ならないですよね。「できるのか?」という気になりませんか?
井上 なります。いっちゃってますねえ(笑)。
村上 しかも要さんは、もともとトヨタでF1のウイングを作っていましたからね。
林 ええ。翼を作るのが結構得意でした。
村上 LOVOTのこの辺りにも翼っぽいものが。
北川 LOVOTが飛ぶ!
林 まだ飛ばないですけれどもね。
石川 さらなる100億円で、これから翼を生やして(笑)。
林 もう100億円あれば。いえ、足りない、足りない(笑)。
LOVOTを作るときに最初は「こんなの、お金を集めて作ってもかわいくならないかもしれない」と思うわけです。
そのときに、すごく勇気づけられたのが、「受動意識仮説」でした。
GROOVE X林さんを勇気づけた「受動意識仮説」とは
林 「受動意識仮説」は仮説なので証明されていませんが、元ロボット研究者の前野隆司さんという方がいらっしゃって、今は「幸福学」を研究されています。
前野先生が提唱された「受動意識」は当時、世界的に知られていたわけではないのですが、その後、世界の脳科学、神経科学の潮流も、その仮説の方向に合ってきているようです。
▶前野隆司さんによる「受動意識仮説」の解説。
「私」は「司令塔」でなく「観察者」、AI構築の仮説 進化する人工知能(番外編)(日本経済新聞)
「受動意識仮説」を知って、「おっ、これは作れるな。ロボットいけるな」と思って、100億円を集め出しました。
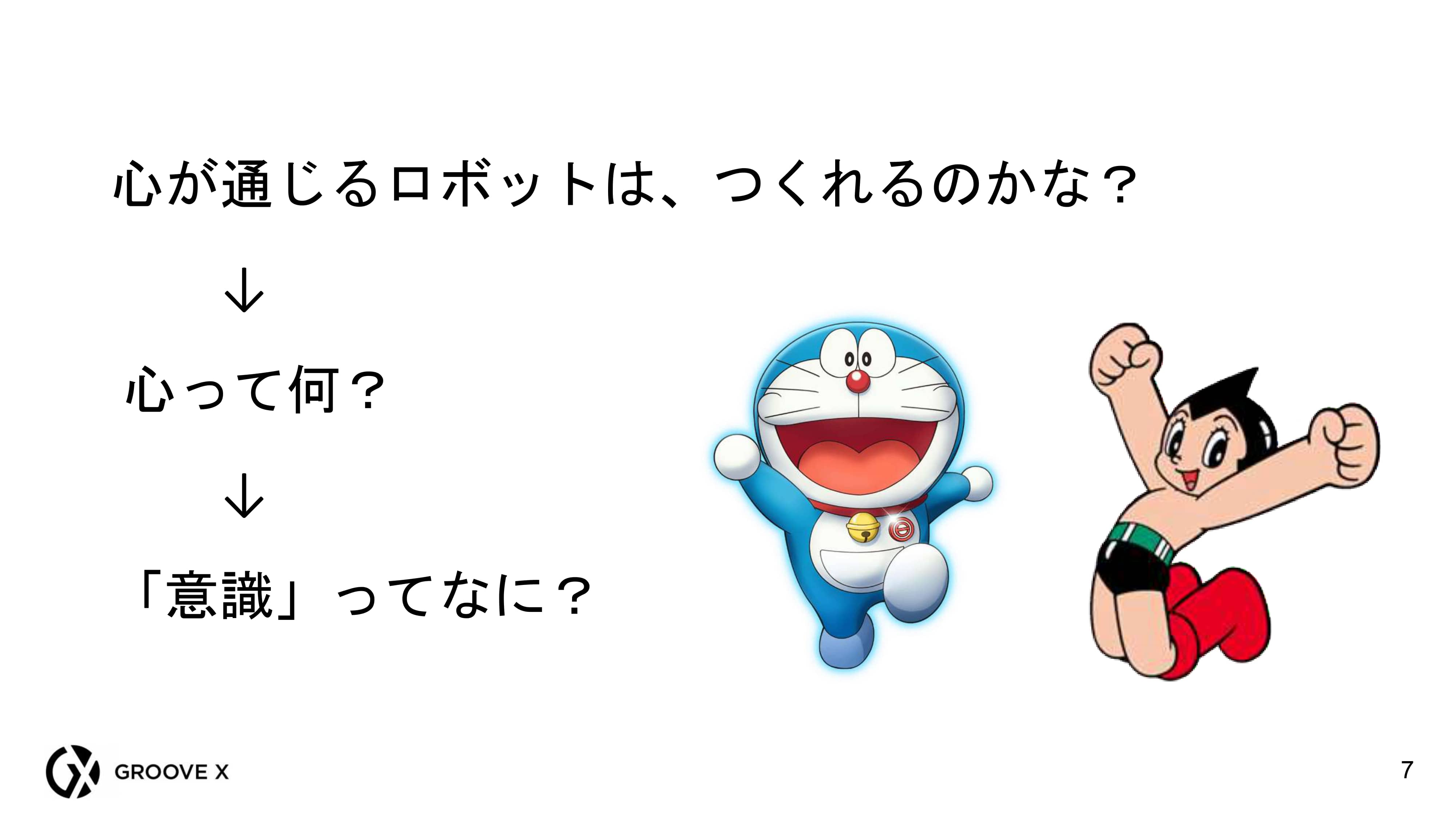
それまで「心が通じるロボットは、作れるのかな?」と考えたときに、ドラえもんやアトムがあっても、未知なる科学技術で作るものだろうと思っていましたが、前野先生の「受動意識仮説」を知り、「心って何?」というのが分かって、「“意識”って何?」というのがなんだか分かる気がしました。
▶脳はなぜ「心」を作ったのか「私」の謎を解く受動意識仮説(ちくま文庫)
実験で分かった「意識は意思決定をしていない」!?
林 これはベンジャミン・リベット教授の実験で、比較的有名です。実際にはピースサインではなく光でしたが、このような実験をやりました。
▶「自由意志」は存在する(ただし、ほんの0.2秒間だけ):研究結果(WIRED)

ピースサインを出すときには、まず意識が「指を動かそう」と考えて、脳がそれに対して動作を生成して、指をピースの形にできると一般的に考えられていました。
それに対して、脳を開けて電極を挿し込んでみたところ、まず電極が反応しました。要は脳の中の神経の発火が最初にあって、それから遅れて「意識」が自分は何かを行動すると決めて、それから指が動いているという実験結果でした。
ここで分かったのは、自分の意識は「最初に意思決定をしているのではない」可能性があるということです。意識が意思決定する前に、無意識的に脳が反応してまずピースサインを出そうと準備して、それを後追いで「意識」が追認することで意識は、自分で決めて行動したと理解しているのではないかという、ここが原点になっています。
井上 なるほど。
「意識」は後から付与されたモジュール
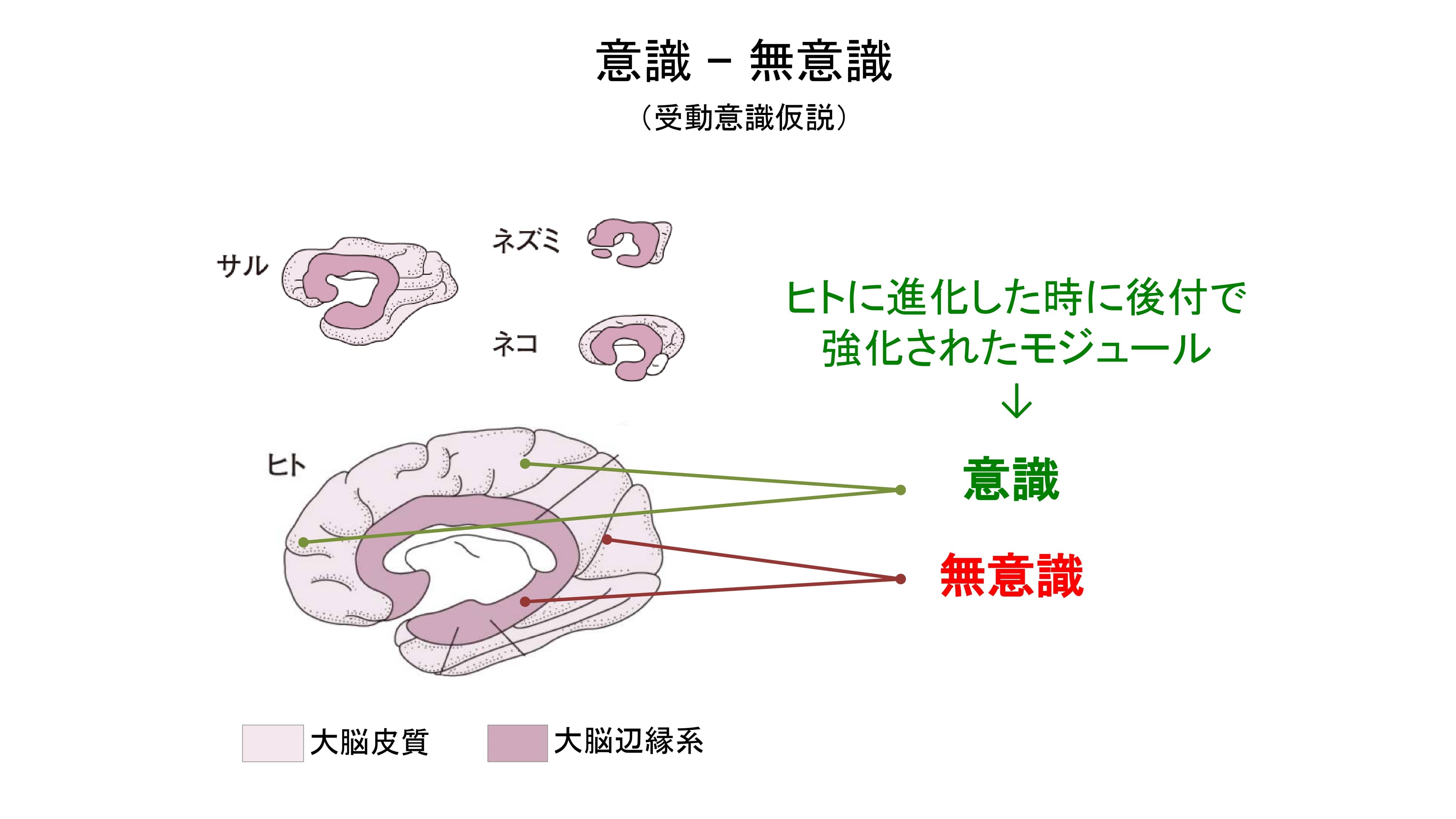
林 では、「意識」と「無意識」を考えたときにどうなっているかというと、「意識」は大脳皮質に点在していると言われています。
「無意識」は皮質にも辺縁系にも点在していると言われています。
ここから分かるのは、「意識」はこの周りの皮質にしかないということです。
ネズミ、ネコ、サルと見比べてみると、辺縁系はほとんど一緒です。「無意識」は実は比較的似通っているのに対して、「意識」は後から付与されたモジュールで、ヒトと他の動物ではかなり異なるのではないかと考えることができます。
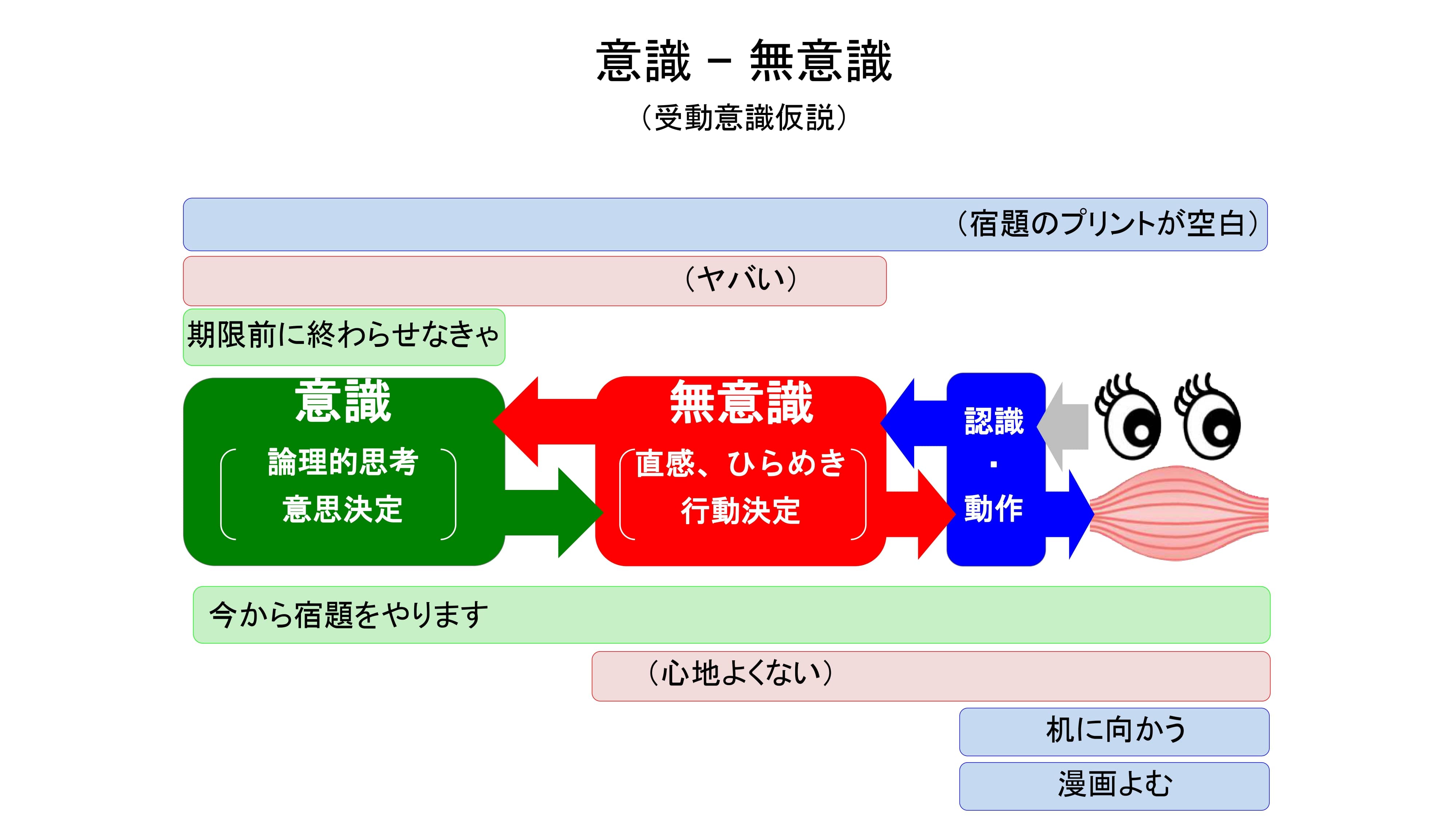
これを模式図で書くと、例えば下に筋肉や、目のようなセンサーがあって、それが神経系を通って脳幹に繋がります。
その後で、ネズミ、ネコ、サルと同様に辺縁系がその脳幹の周りを覆って、その上で皮質ができるという構造になっています。
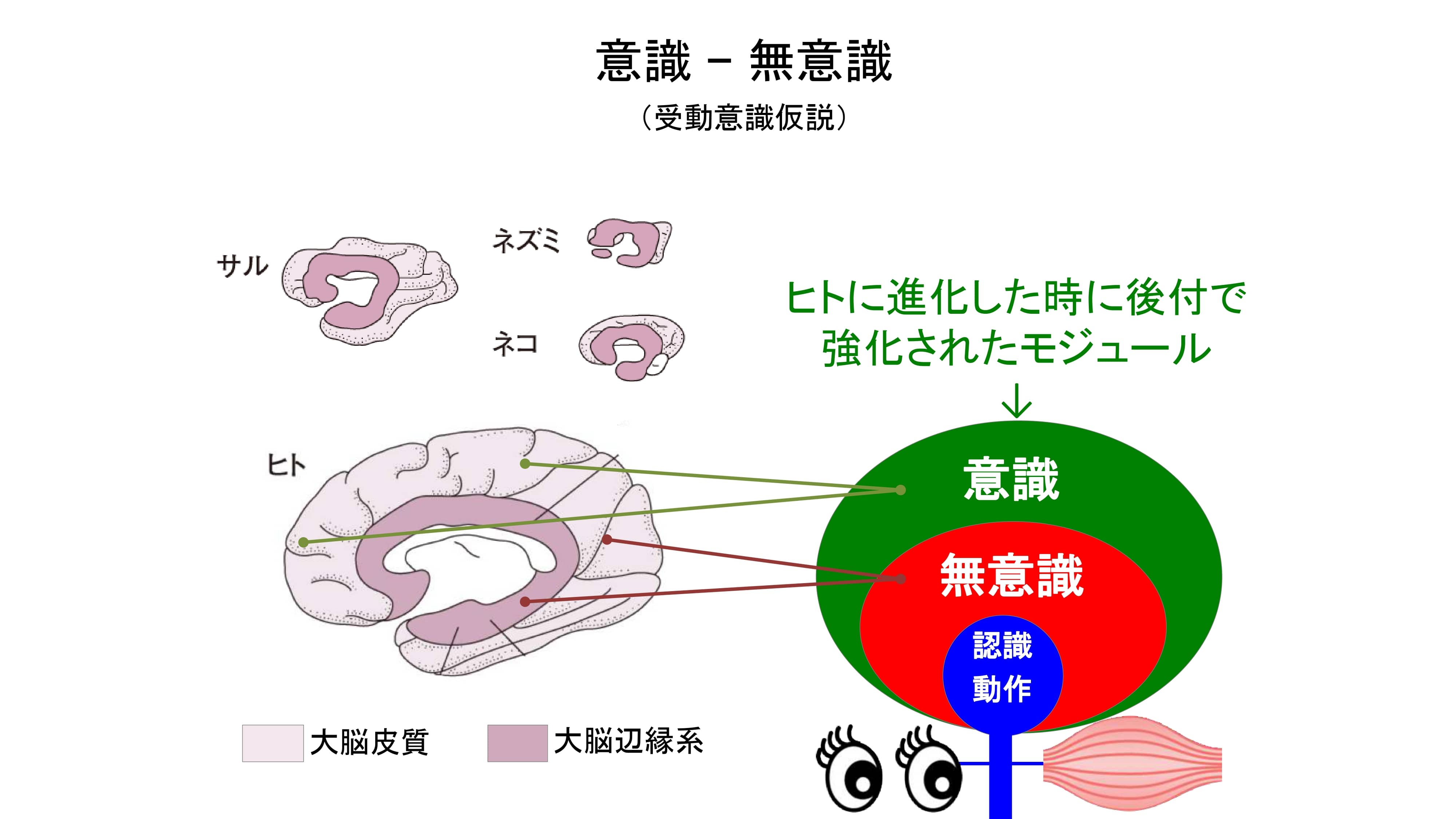
これを情報の流れで見ると、例えば目から情報が入ってきます。
村上 センサー系ですね。
林 そうです。情報が青い所に行って、赤色の「無意識」の所に行きます。
その次にようやく緑色の「意識」の所に行きます。これは、こうして模式的にみると当たり前にも見える話です。
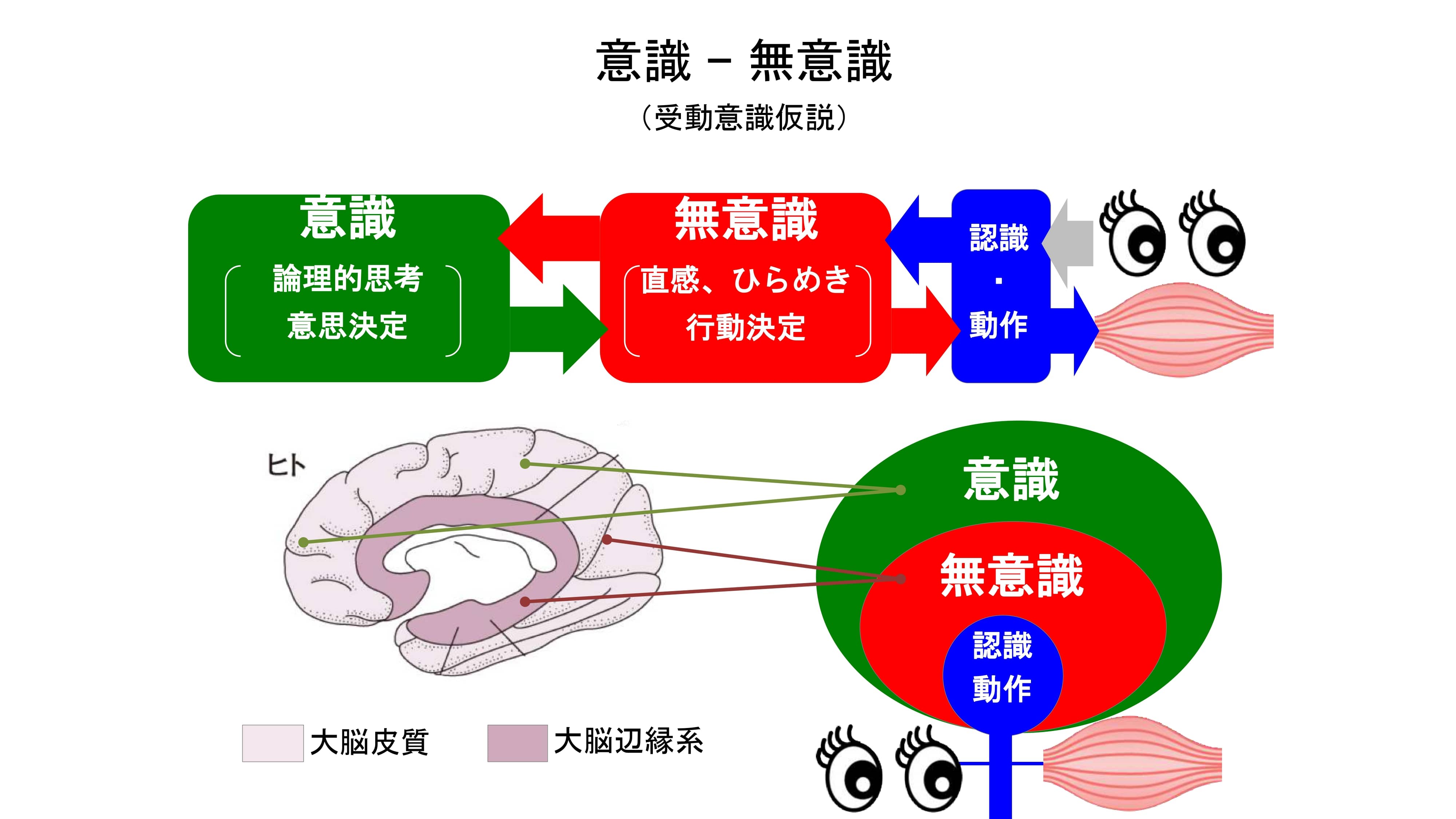
でも、これがその通りなら、実は衝撃的な面があります。なぜなら「意識」が意思決定したとしても、直接筋肉を動かさずに、「無意識」に行くわけです。
「無意識」に行った後に、さらにようやく脳幹を通って筋肉が動きます。
このシンプルな事実が大変なことを巻き起こしています。
「意識」は、自分の行動に対して後付けで理由を付ける
林 例えば夏休みの最後の日、「宿題をやっていない、プリントが空白である」と思い浮かべてください。
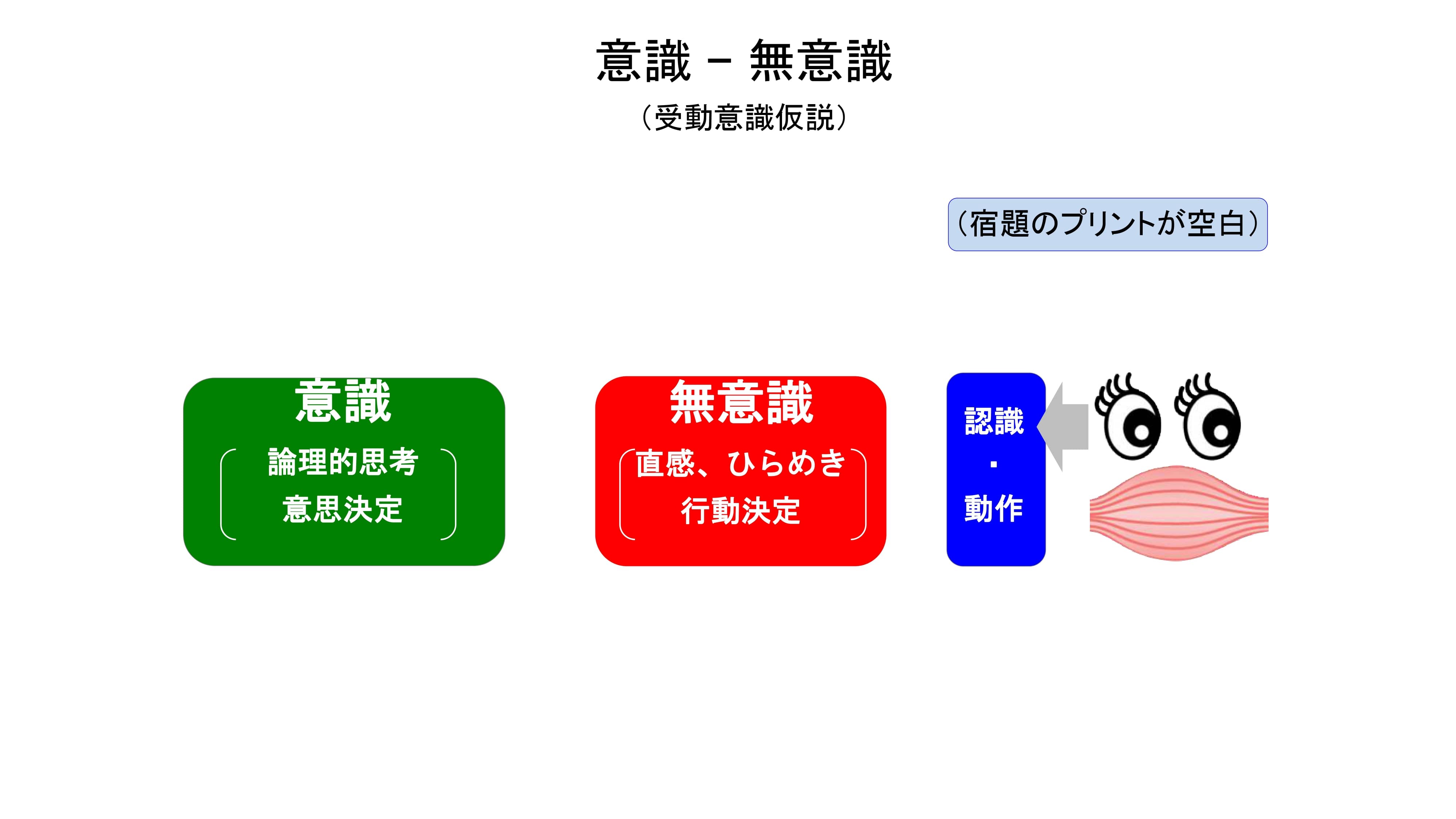
村上 無意識がセンサーで認識しましたね。
林 認識したわけです。これは今のディープラーニングなどの機械学習を駆使したら、「やるべきものをやっていない」と分かるレベルです。
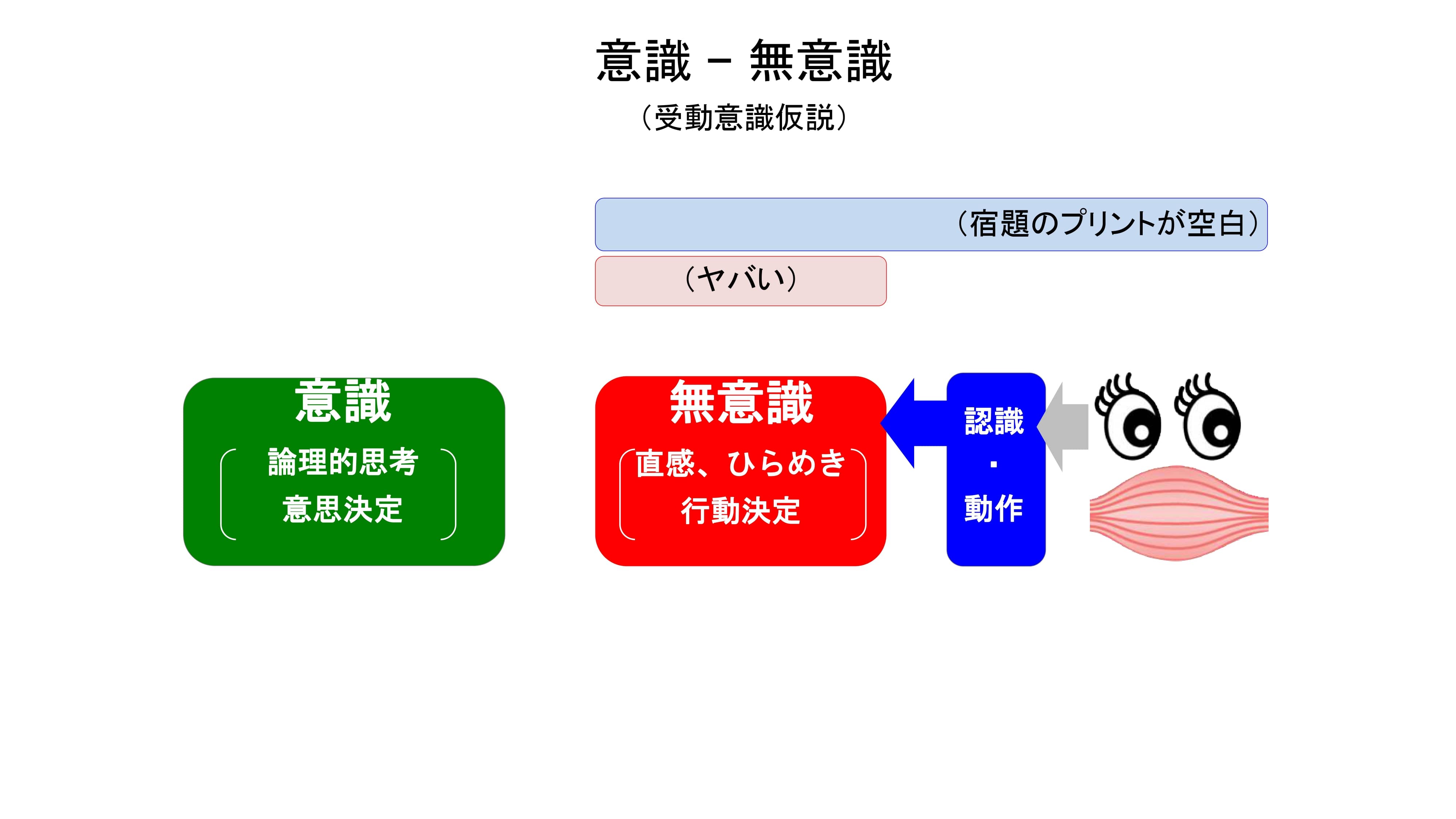
井上 「ヤバい」と。
林 かなり「ヤバい」と。でも「ヤバい」は「無意識」が感じるわけです。いろいろなことを想像して不安を感じるわけですよね。
「ヤバい」と来た後で「意識」がどうするかというと、「期限前に終わらせなければ」となります。

「ヤバい」から逃げようではなく、「より問題を大きくしないようにしたい」という意思決定をすることができます。
その場合は意識はもう一段、問題を大きくしないようにするために「今から宿題をやる」と意思決定が選択できます。
村上 やる・やらないの意思決定がここでされるわけですね。
林 やらないという意思決定もあります。
村上 すっとぼけるか、やろうかということですね。
林 今回は「やる」と決めたとしましょう。

その後で、そのまま筋肉が動けばいいですよね。ロボットだったらそのまま筋肉が動きます。
でも人間の意識は筋肉をそのまま動かせないので、無意識に情報の流れとしてまずフィードバックをします。
そうすると「嫌だな」「心地良くないな」と思いながら、宿題をやらなければいけません。
そうすると結果的に机には向かうのですが、なぜかいつの間にか漫画を読んでしまいます。
(壇上「なるほど!」の声)
林 これは謎の意思決定です。なぜならロボットを作るときに、「宿題をやる」と決めたにもかかわらず、「漫画を読む」なんていうアルゴリズムは作れないですよ。
村上 そうですね。if 文(※)で条件決定がされたら、“Just do it.”ですね。
▶編集注:手続き型プログラミング言語の基本的な1つで「もしAならばBを実行せよ」という書き方。
林 そうです。これが「受動意識仮説」の大事な部分で、僕たちはなぜ漫画を読んだのか知らないのに、理由を聞かれると、後付けで理由を作るのです。

「だって、俺はあの漫画、好きだし」とか言いますが、でもそれが本当の理由かというと、かなり怪しいです。
「意識」というのは、実は「無意識が生成した自分の行動に対して、理由を推測している装置」という機能を担う面があると推測されます。
(続)
次の記事を読みたい方はこちら
続きは LOVOT開発秘話②ドラえもんを作りたい!GROOVE X 林 要さんが求める「意識のモジュール」 をご覧ください。
▶新着記事を公式LINEでお知らせしています。友だち申請はこちらから!
▶ICCの動画コンテンツも充実! YouTubeチャンネルの登録はこちらから!
編集チーム:小林 雅/小林 弘美/星野 由香里/戸田 秀成/浅郷 浩子
他にも多く記事がございますので、TOPページからぜひご覧ください。
更新情報はFacebookページのフォローをお願い致します。
