▶平日 毎朝7時に公式LINE@で新着記事を配信しています。友達申請はこちらから!
▶ICCの動画コンテンツも充実! Youtubeチャネルの登録はこちらから!
ICCサミット KYOTO 2018 Honda Xceleratorカタパルトに登壇し、準優勝・特別賞のダブル受賞に輝いた、メルティンMMI 粕谷 昌宏さんの【メルティンMMIは、サイボーグ技術で“創造性が身体に制限されない世界”を実現する】文字起こし記事をぜひご覧ください!
▶ICCパートナーズではコンテンツ編集チームメンバー(インターン)の募集をすることになりました。もし興味がございましたら採用ページをご覧ください。
ICCサミットは「ともに学び、ともに産業を創る。」ための場です。毎回200名以上が登壇し、総勢800名以上が参加する。そして参加者同士が朝から晩まで真剣に議論し、学び合うエクストリーム・カンファレンスです。次回 ICCサミット FUKUOKA 2019は2019年2月18日〜21日 福岡市での開催を予定しております。参加登録は公式ページをご覧ください。
ICCサミット KYOTO 2018のゴールド・スポンサーとして、Honda R&D Innovations様に本セッションをスポンサー頂きました。Honda Xceleratorは、Hondaのオープンイノベーション・プログラムです。

▼
【登壇者情報】
2018年9月4日〜6日開催
ICCサミット KYOTO 2018
Session 7A
Honda Xcelerator カタパルト
Sponsored by Honda R&D Innovations
(プレゼンター)
粕谷 昌宏
株式会社メルティンMMI
代表取締役
1988年生まれ。創造性の追求において身体がボトルネックとなっていることに1991年に気づき、以来解決策を追い求めてきた。1998年に医療と工学の融合分野が解決策となることを予想し、2002年からサイボーグ技術の研究を開始する。2006年に早稲田大学理工学部に入学、2007年に初めての論文を執筆。2011年にはロボット分野で活躍した35歳未満の研究者に贈られる日本ロボット学会研究奨励賞を受賞。2012年には、VR空間内の体と現実の体を生体信号により接続しシンクロさせる手法を開発し、電気通信大学大学院に移動。日本学術振興会特別研究員を経て2013年にサイボーグ技術を実用化する株式会社メルティンMMIを創業。2016年にはロボット工学と人工知能工学で博士号を取得、2017年に代表取締役に就任。回路設計から機構設計、プログラミングやネットワークシステム構築と幅広く開発をカバーする。2018年にはForbesより世界の注目すべきアジアの30人として選出された。
▲
▶「ICC KYOTO 2018 Honda Xcelerator カタパルト」の配信済み記事一覧
粕谷 昌宏 氏(以下、粕谷) メルティンの粕谷です。よろしくお願い致します。
現在、ロボットやAIが話題になっておりますが、僕たちはそのさらに次をいく、サイボーグ技術を研究開発しています。
サイボーグが人間の制約を突破し、創造性を発揮する世界へ
僕たちのビジョンでありミッションは、人間が機械を使うのではなく、人と機械を融合させることによって人間が持つ様々な制約を突破し、創造性を100%発揮できる世界を作ることです。
僕たちは約20年間の研究開発の経験を持つR&Dチームを有しており、僕たちが持つ強力なコアテクノロジーが、「生体信号処理技術」と「ロボット技術」の2つです。
生体信号というのは人の身体の中を流れている電気信号で、この信号によって、僕たちはモノを見たり聞いたり、動いたり考えたりすることができます。
次のスライドの左側にある赤い波形のようなものが生体信号です。
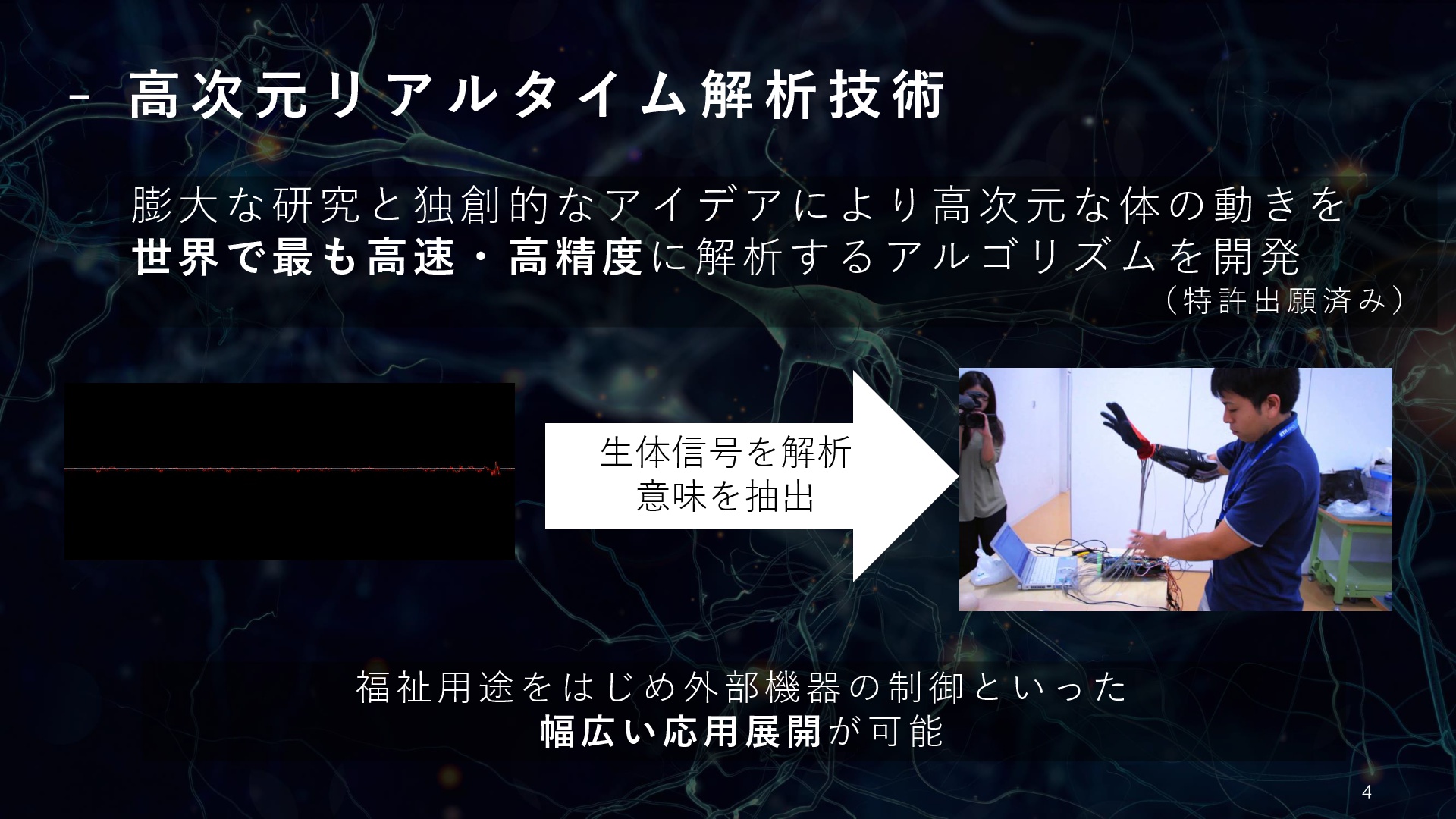
右側にいる方は、実は事故で右手を失った方ですが、生体信号を解析・応用することによって、あたかも自分の手のように動くロボットハンドを手に入れることができました。
これが僕たちの生体信号処理技術です。
そしてもう1つのコア技術であるロボット技術ですが、一番の特徴は、小型軽量、パワフル、スピードが速い、複雑な動きができる、耐久性が高い、これら全ての要素を同時に満たすことです。
当然、パワフルなロボットもスピードが速いロボットも既に存在していますが、これらを同時に満たすものはなかなかありません。
特に次のスライドの右下のグラフにあるように、「関節をいくつ動かすことができるか」ということと、「どれ程パワーが出るか」ということは両立させることが非常に難しい2つの分野になっており、市場にあるロボットをプロットすると、綺麗に反比例のグラフのような形になります。

僕たちは前述のコア技術を使うことによってその2つの分野を両立させ、単独でグラフの右上に位置することができました。
生体信号処理技術とロボット技術、この2つを掛け合わせることで、冒頭に触れた、「創造性が身体に制限されない世界」を作ることを目指しています。
地理的制約からの解放、身体の選択、思考による通信

その世界が具体的にどういうものかと言うと、まず1つ目は「地理的制約からの解放」です。
今まで、人間は自分がいる場所でしか行動できなかったわけですが、人工的な機械の身体を手に入れることによって、その機械の身体を自分から非常に遠くに置いておくことができます。
そしてその身体にインターネットを経由して自分の意識をログインすれば、自分はどのような場所にでも同時に存在することができるようになるのです。
2つ目は、「身体を選択する未来」です。
上記の動画の中央で僕が自分の身体にロボットハンドを装着し、そのロボットハンドに僕の生体信号を流し込むことによって、僕は一時的に3本の手を持つ人間になっています。
これは、2本の手では行いづらい“ハンダ付け”に取り組んでいるところです。
今まで、人間は2本の手・10本の指をベースとして「自分には何ができるか」という構想をスタートさせていました。
しかし、サイボーグ社会ではこのプロセスが完全に逆になります。
つまり「自分が何をしたいか」ということから始まり、それを行うことができる身体を手に入れればいいという、逆のアプローチになるのです。
それにより、既成概念にとらわれずに、全ての人が無限の可能性を持つことができます。
そして最終的には、「思考による通信」を目指しています。
現在は言語、音声、もしくは文字でしか他者とはコミュニケーションが取れません。
今後は、脳波などの生体信号を活用して、自分が考えていることやビジョン、記憶などといったものを、言語を介さずに直接やりとりすることができるようになります。
それが可能になると、今では考えられないようなスピードと精度でコミュニケーションを取ることができるようになるのです。
このような3つの要素を押さえることで、創造性を制限なく発揮でき、身体をボトルネックとしない世界を実現できるのではないかと考えています。
遠隔操作可能なMELTANT-αが人間の身体に代わって活躍する
そして1つ目に挙げた場所からの解放を目指して研究開発しているのが、こちらの「MELTANT-α」というアバターです。
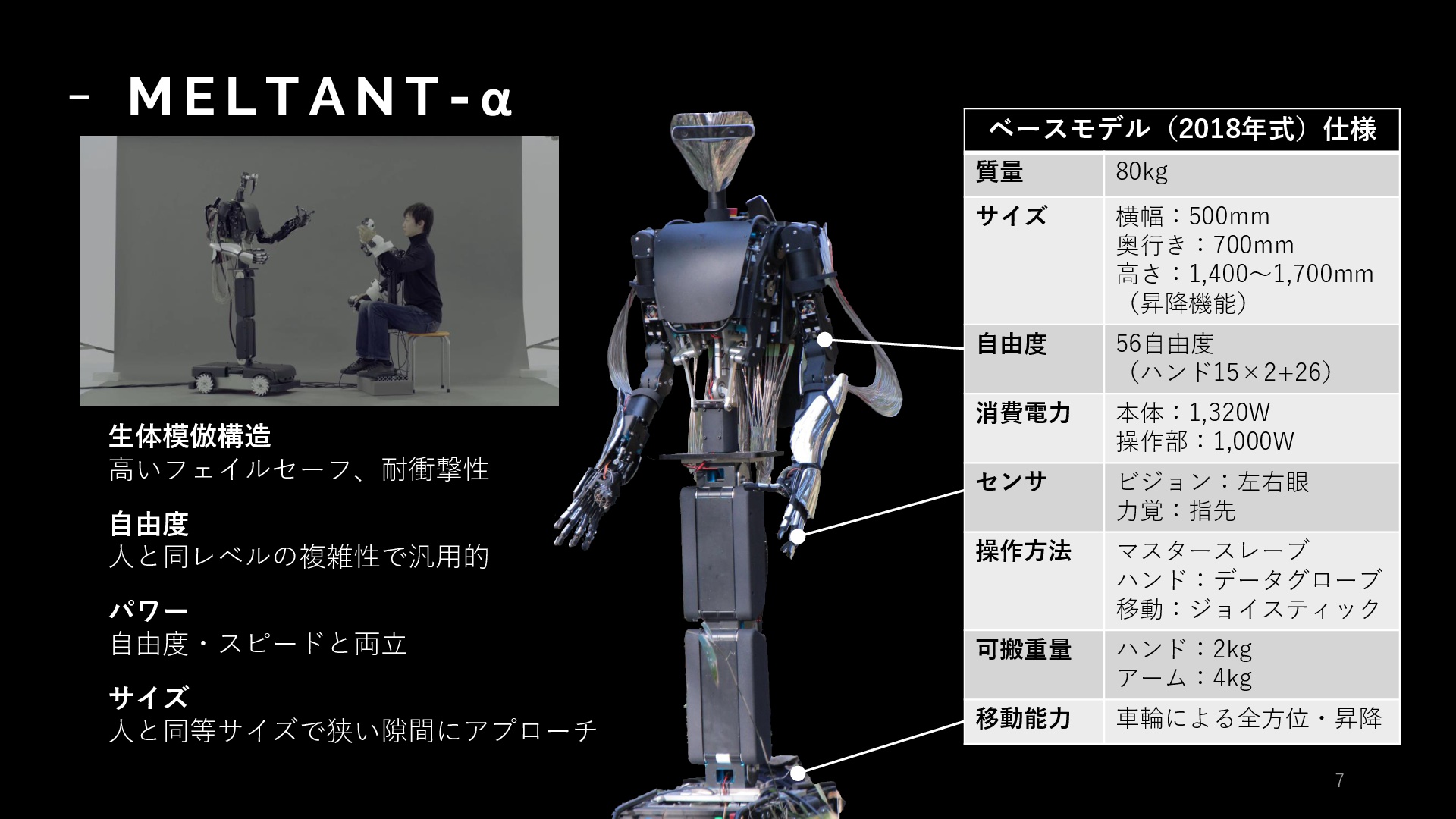
MELTANT-αは実際に人と同じようなタスクができます。
身長は170cm、体重は80kgで、しゃがむと140cmほどになります。
3本の指で2kgの物体をつまみ上げることができるほどパワフルで、触覚などのフィードバックも搭載しています。
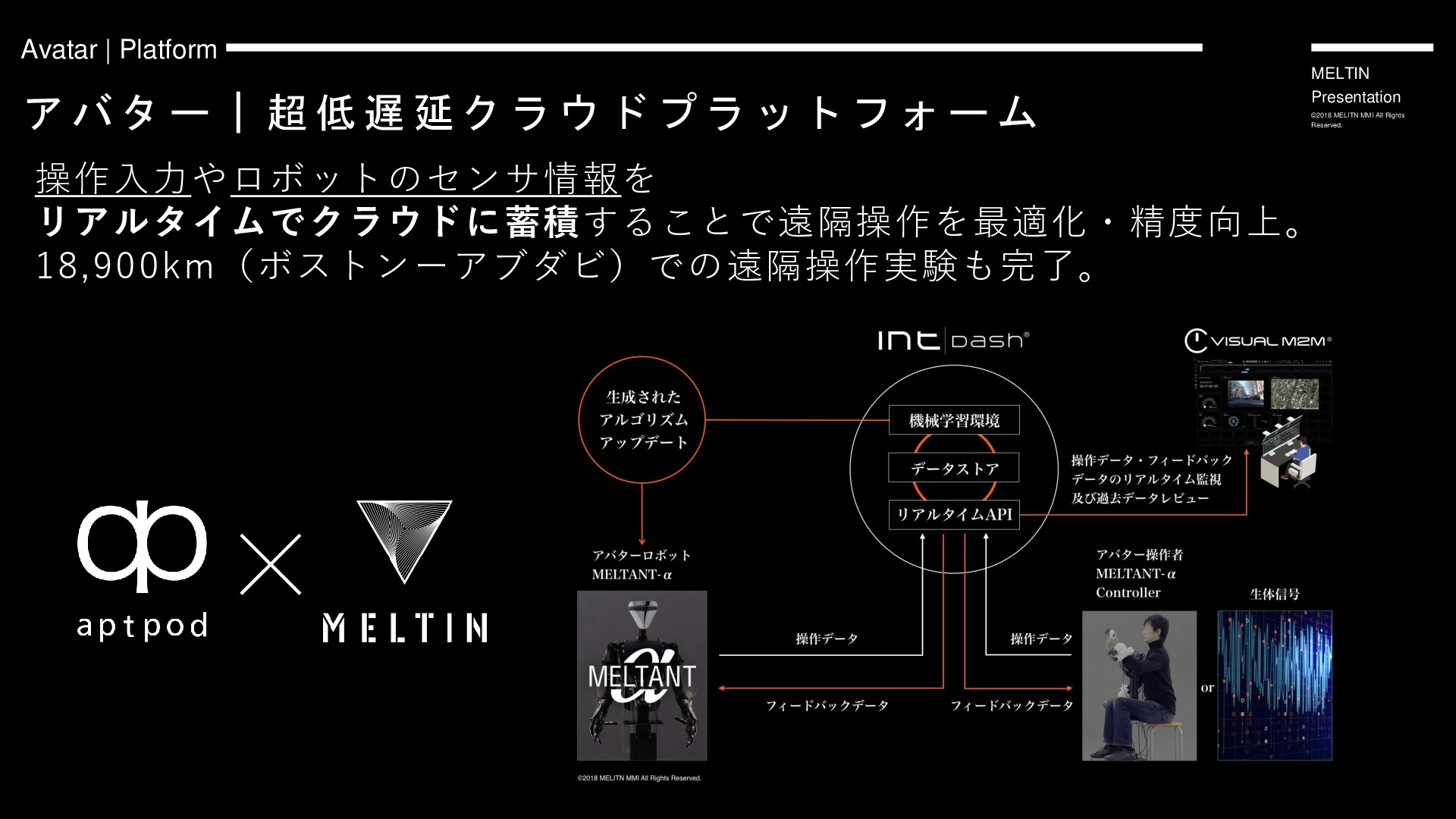
遠隔操作というと、操作にどの程度の遅延が発生するかが重要になりますが、僕たちは超低遅延のプラットフォームを開発しており、実際に1万8,900km、これは日本のサーバーを経由してボストン-アブダビ間、地球約3分の2周に相当しますが、この間の遠隔操作実験も完了しています。
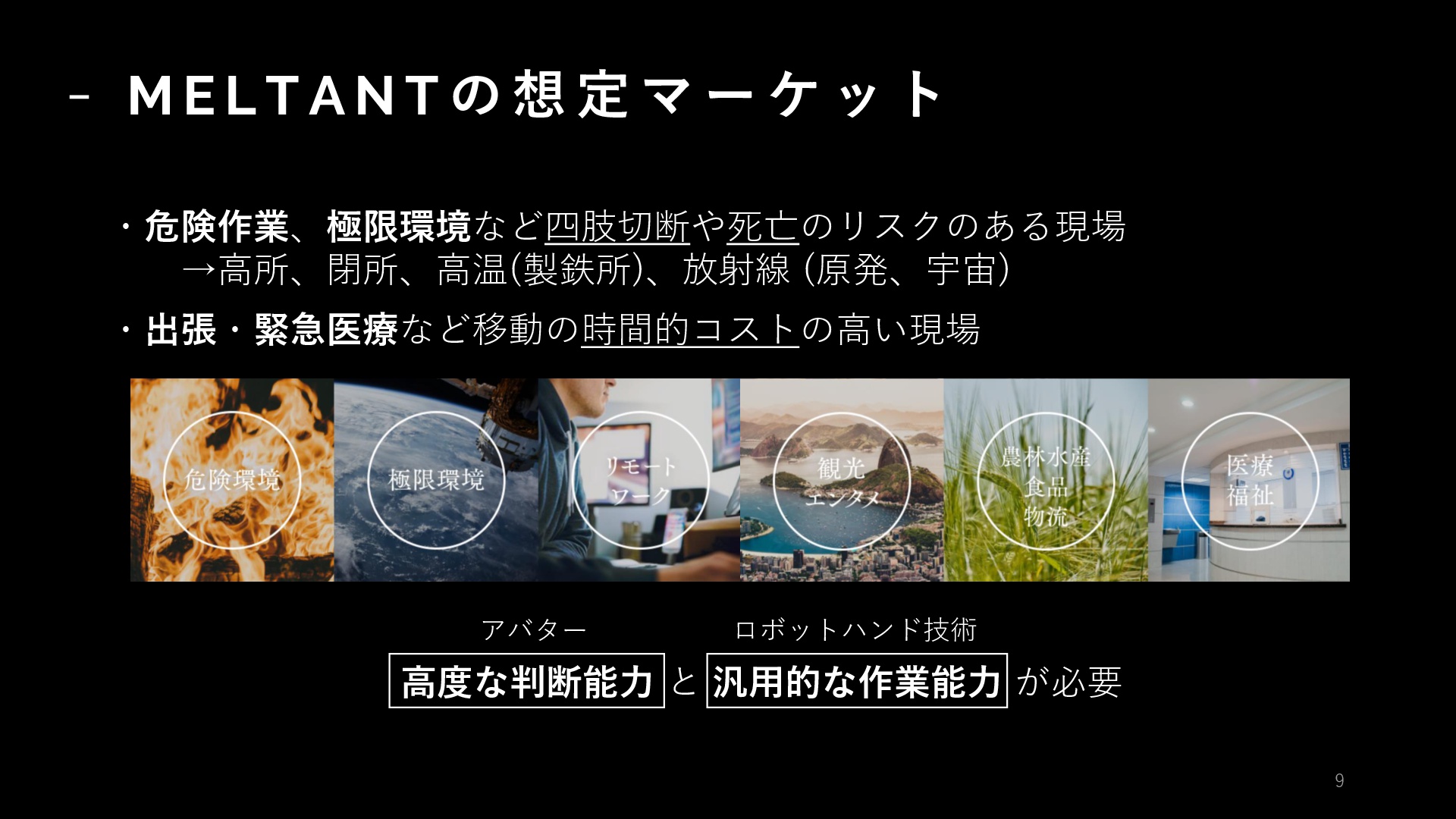
実際にMELTANT-αがどのような場で使われるかと言うと、四肢切断や死亡といった事故が起きている危険な作業現場が未だ存在しておりますので、このような場で人間に代わって活躍することを考えています。
もしくは、出張や緊急医療など、移動の時間的コストが非常に大きい現場において活用し、移動を一瞬のものとすることもできます。
今までもこのような現場ではロボット化が望まれていましたが、高度な判断能力と汎用的な作業能力が今までのロボットにはなかった為、実現できませんでした。
僕たちのアバターであれば、遠隔操作しているため判断能力は人と同等です。
そしてここに僕たちのロボットハンドの技術が加わると汎用的な作業能力も手に入るので、これまでにはなかったロボットが誕生するのです。
1つの事例として、宇宙産業分野においてJAXAさんと一緒に取り組んでいる案件をご紹介します。
この分野には、実際に生命のリスクや食料問題のリスクがあります。軌道上にアバターを設置し、それを地上から遠隔操作することによって人と代替できないかと考え、国際宇宙ステーションへの導入に向けて検討が進められているところです。
あらゆる場面でアバターが活躍する社会を目指して
このように僕たちはアバターロボットの研究開発を行っていますが、HONDAさんと一緒に何ができるかということについてお話しします。
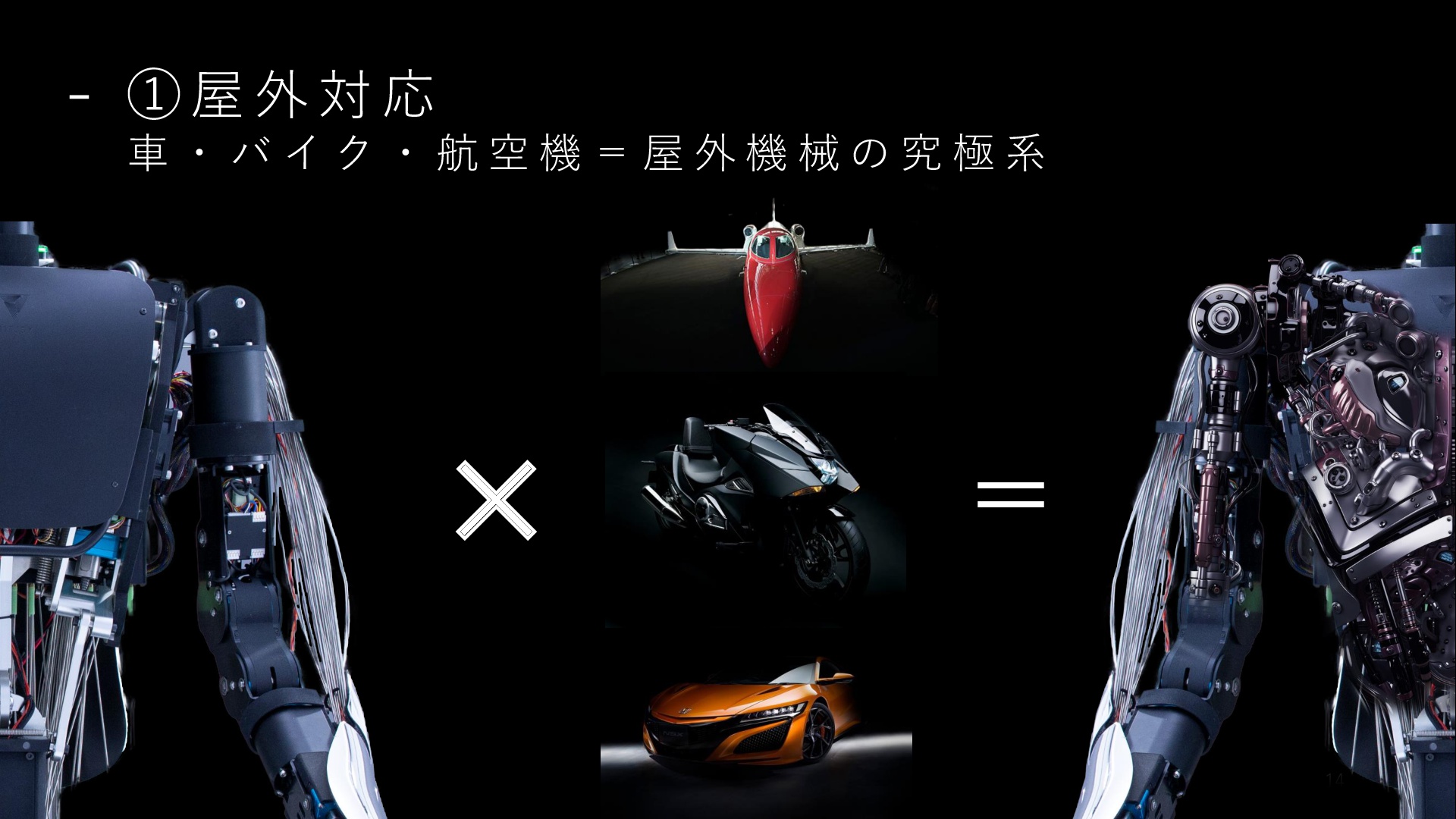
まず、先程ユースケースを紹介しましたが、我々が取り組んでいる課題の中には屋外対応が必要なものが多く、屋外環境で確実に稼働するシステム構成が必要です。

HONDAさんが開発されている車、バイク、航空機などは、屋外で稼働する機械の究極系だと思います。
そこで、僕たちMELTINのテクノロジーとHONDAさんの車、バイク、航空機などのテクノロジーを掛け合わせることにより、災害地などを含むいかなる環境でも活動できるような、強力なMELTANTを作ることができるのではないかと思っています。
もう1点として、MELTANT-αは次のスライドの通り未だ車輪で移動しており、モビリティは非常に弱いです。

そこで、モビリティ分野でご活躍されているHONDAさんと協力することで、どのような場所にでも進入できるMELTANTを作ることが可能なのではないかと思っています。
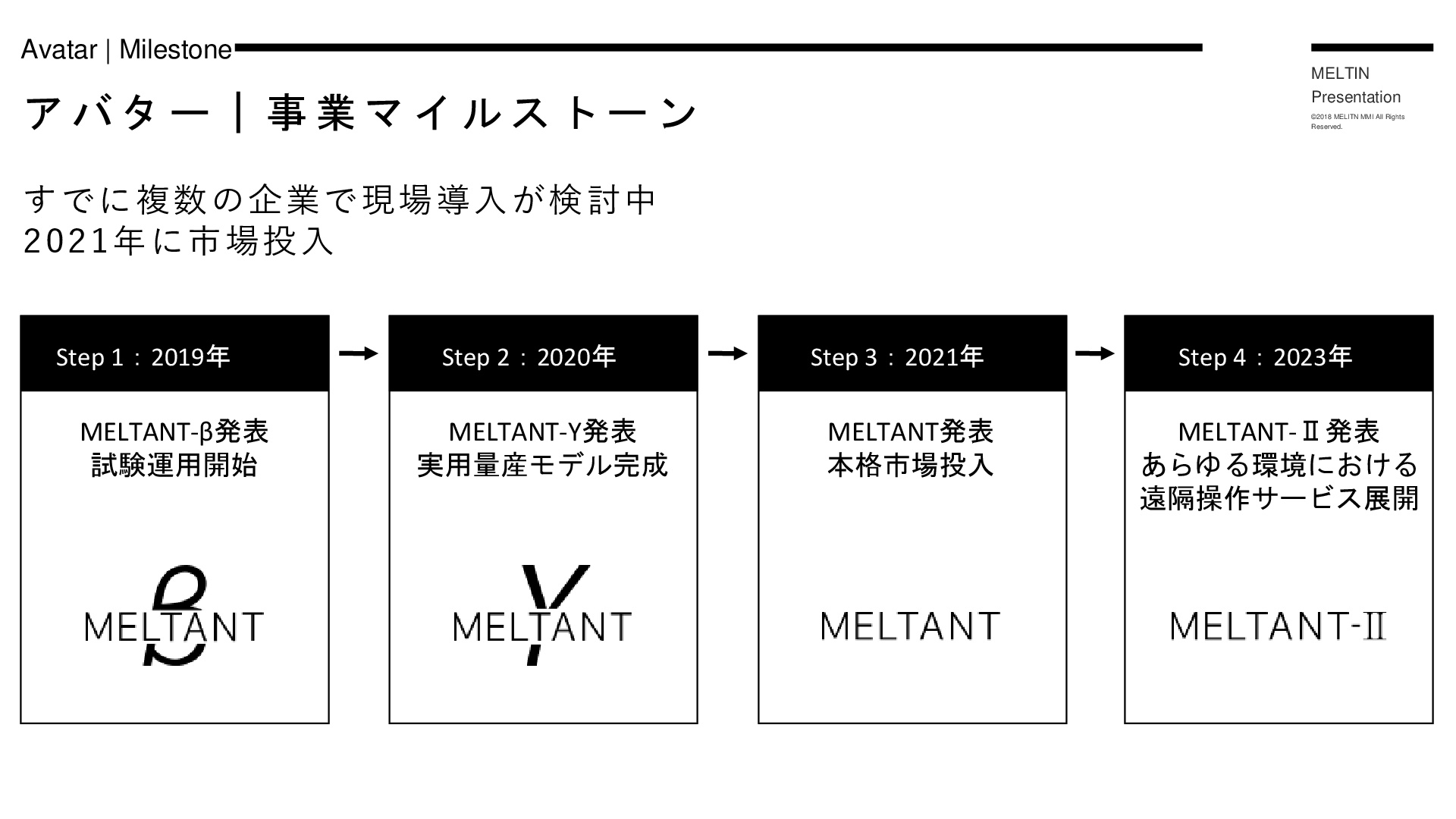
現在、実際に複数の企業で導入の検討が始まっており、僕たちとしても2021年には市場投入をし、2023年には災害現場など、あらゆる場で稼働できるMELTANTを開発していきたいと思っております。
ここに向けて、ハンドのプロとモビリティのプロ、この掛け合わせにより、あらゆる場面でアバターが活躍する世界を共に作っていきましょう。
ありがとうございました。
(終)
▶平日 毎朝7時に公式LINE@で新着記事を配信しています。友達申請はこちらから!
▶ICCの動画コンテンツも充実! ICCのYoutubeチャネルの登録はこちらから!
編集チーム:小林 雅/上原 伊織/尾形 佳靖/戸田 秀成/平井 優花
更新情報はFacebookページのフォローをお願い致します。
