
京都大学発ベンチャー、データ未来研究センター小田さんのプレゼンテーションを2回シリーズでお届けします。(その1)は、データ未来研究センターのコアとなるトマホークミサイルからドローンへの技術転用についてお話し頂きました。2016月9月6日・7日に開催したICCカンファレンス KYOTO 2016スタートアップ・コンテスト「カタパルト」プレゼンテーションの書き起こし記事です。ぜひ御覧ください。
スタートアップビジネスの「エコシステム」を構築し、日本の起業家を支援するプログラム「IBM BlueHub」は「カタパルト(CATAPULT)」のオフィシャル・サポーターです。
![]()
登壇者情報 2016年9月6日・7日開催 ICCカンファレンス KYOTO 2016 「ICC SUMMIT」 Session 1B CATAPULT(カタパルト) - スタートアップ・コンテンスト- Supported by IBM BlueHub (プレゼンター) 小田 雄一 株式会社データ未来研究センター 代表取締役CEO 京都大学大学院農学研究科博士課程満期取得退学。修士、博士課程在籍時にイスラエルへ渡航。ベンチャー精神にふれ起業を決意。京都大学VBLにて会社を設立、京都大学理学研究科花山天文台台長柴田一成教授(宇宙事業)、JAXA主幹研究員中野不二男(衛星データ)、京都大学医学研究科浜中雅俊研究員(人工知能)を顧問にむかえ研究開発を開始、CEOに就任。衛星データをディープラーニングにより解析する事業をおこなう。現在それらを用い、非GPS下におけるドローンの位置推定技術、3次元位置情報サービスを開発中。イスラエル・ヘブライ大学、アリエル大学と研究交流をもつ。好きな仏教者は法然、好きな寺は当麻寺。
小田雄一氏(以下、小田) 宜しくお願い致します。
データ未来研究センターの小田と申します。
弊社の事業内容としては、ドローンの自動運転用地図の開発を行っています。

弊社は京都大学発のベンチャー企業であり、宇宙の専門家(京都大学理学研究科、花山天文台)、京都大学と共同研究を行っているRESTICの衛星データ専門家(京都大学宇宙総合ユニット)、人工知能の専門家(京都大学医学研究科)という各分野の研究者の方々の協力を得て地図開発を行っています。
そのため、「衛星データとその解析」に強みを持っています。
弊社が、どのようなイノベーションを起こそうと考えているか?
われわれが狙うイノベーションは、「GPSを超える位置情報」です。
この写真は、ご存知の方もいらっしゃると思いますが、姫路城で事故を起こしたドローンです。
【参考】 2015年9月、2016年11月国宝である姫路城の大天守にドローンが衝突する事故が発生している。2015年9月の事故を受け、条例により姫路城内でのドローン飛行は禁止となっている。
これはドローンがGPSをロストしたため、自己位置を見失い発生した事故です。
GPSを利用したサービスを作っている等、GPSに接している方々は普段から性能に不満を感じているのではないでしょうか?
ドローンを活用するには安全性が最も重要なので、皆さんが不満を感じている程度の精度ではGPSを自動運転に利用することはできません。

GPSとは衛星測位システムですが、衛星の技術的な潮流をざっと概観しましょう。

衛星技術は、基本的に「軍」から「民」へという大きな流れがあります。
GPSは1973年に軍事用として開発された技術です。
その後大韓航空機撃墜事件があり、このような悲劇を起こさぬよう民間でも利用すべきと考えられ、1989年に機密指定が解かれ民間に開放されました。
【参考】 大韓航空機撃墜事件 冷戦下の1983年9月1日、大韓航空機が航路を逸脱しソ連領空を侵犯。ソ連戦闘機により撃墜され、乗員、乗客合わせて269人全員が犠牲となった事件。
このことからも、宇宙技術全般は軍事が先行利用しているということが分かります。
そこで、弊社は軍事技術のなかからヒントを得てサービスを作りだそうと考えました。
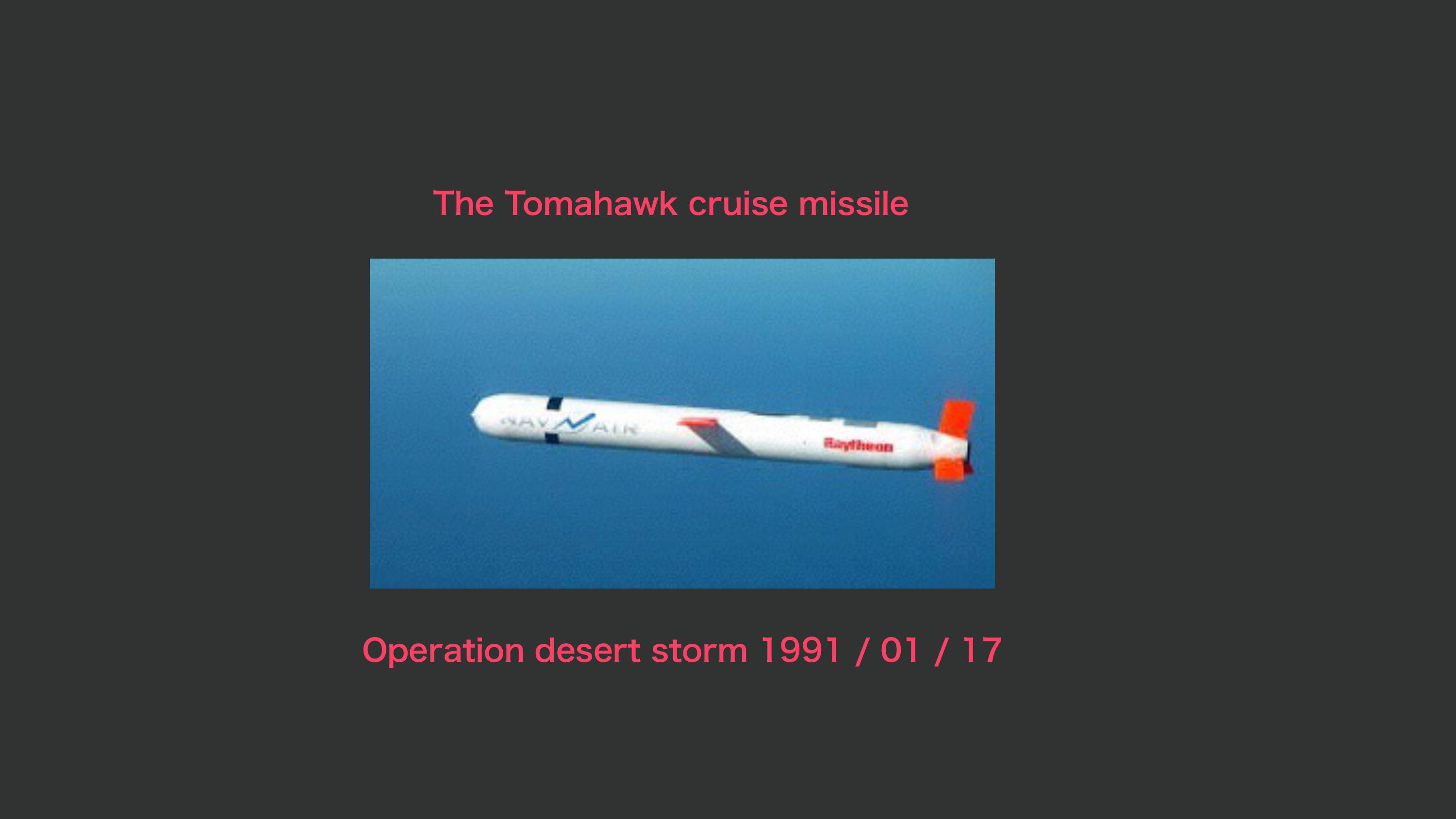
注目したのが「トマホークミサイル」です。
1991年湾岸戦争で初めて投入された巡航ミサイルになります。
このトマホークミサイルの「衛星の利用方法」からわれわれはヒントを得ました。
まず、どのようにトマホークミサイルが管制されているかというと、艦船等から撃ちあげられたトマホークミサイルはターゲットに向かって飛んでいきますが、事前に衛星から、地形情報を受け取ります。
トマホークミサイル自身もリモートセンシング(電子光学センサーにより地上をスキャンし測定する手段)しデータを取得、パターンマッチング(事前に用意された情報と比較し進路修正を行うこと)を行います。

最後に照準を定め、打ち込みます。
このように軍事において使われている技術があるので、これをドローンに応用しようと考えたのが弊社事業のコアな部分です。
つまり、ドローンにレーザーレーダ(LIDAR、光を用いたリモートセンシング技術のひとつ)を搭載しようと考えました。
(続)
編集チーム:小林 雅/榎戸 貴史/戸田 秀成/鎌田 さくら
続きは ドローンが通る「空路」を地図化する - 注目のベンチャー特集「データ未来研究センター」(2) をご覧ください。
【編集部コメント】
続編(その2)では、ドローンの自己位置取得技術を活用し、ドローンの空路を情報化する仕組みについてお話し頂きました。是非ご期待ください。他にも多く記事がございますので、TOPページからぜひご覧ください。
更新情報はFacebookページのフォローをお願い致します。
